Instructions
11.2 S7-1500 Motion Control V1
S7-1500 Motion Control V13 Update 3
Function Manual, 07/2014, A5E03879256-AC
315
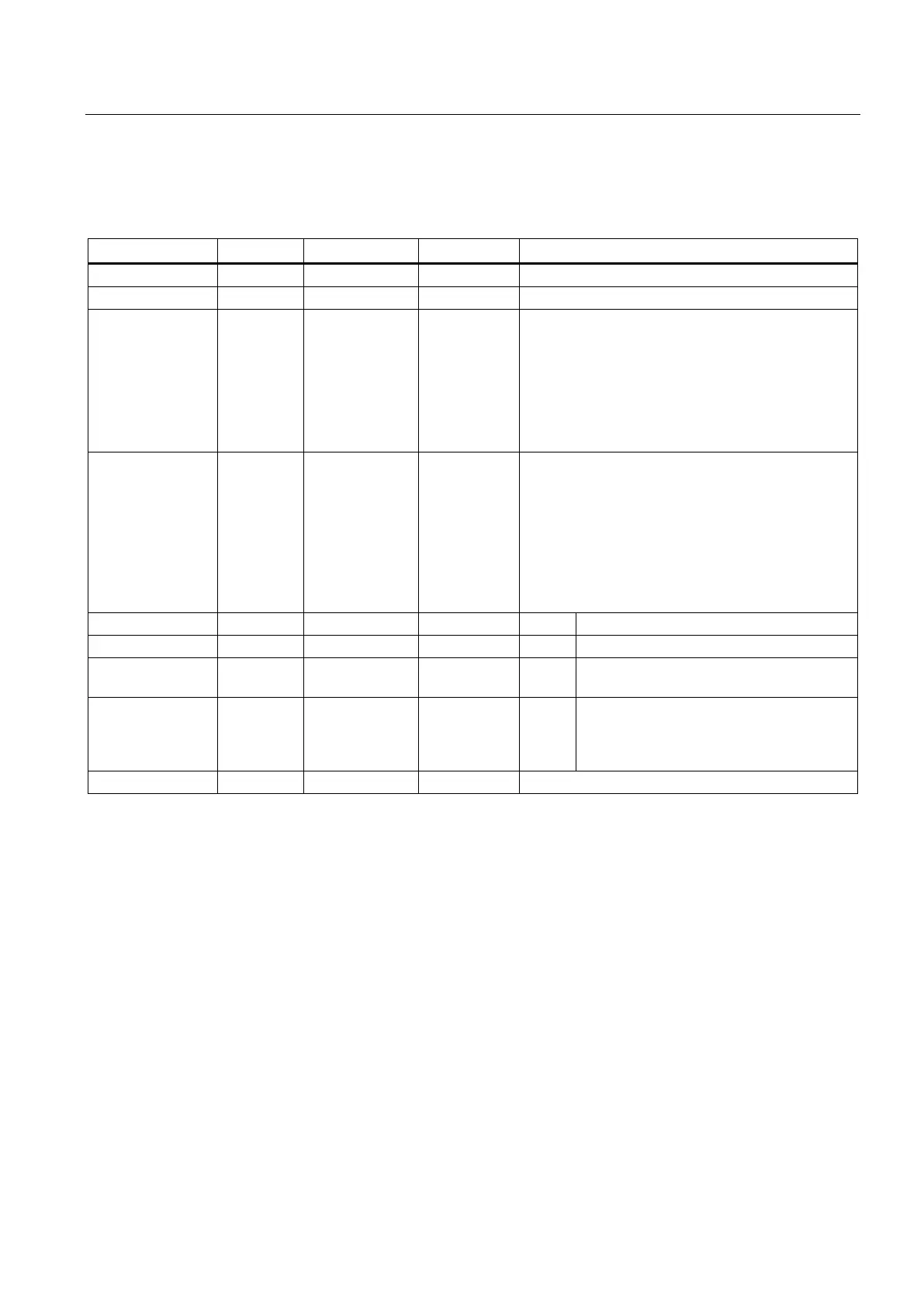
The following table shows the parameters of the "MC_Halt" Motion Control instruction:
Start of the job with a positive edge
Deceleration INPUT LREAL -1.0 Deceleration
Value > 0.0: The specified value is used.
Value = 0.0: not permitted
Value < 0.0: The deceleration configured in "Tech-
nology object > Configuration > Extended parame-
ters > Dynamic defaults" is used.
(<TO>.DynamicDefaults.Deceleration)
Jerk INPUT LREAL -1.0 Jerk
Value > 0.0: Constant-acceleration velocity profile;
the specified jerk is used
Value = 0.0: Trapezoid velocity profile
Value < 0.0: The jerk configured in "Technology
object > Configuration > Extended parameters >
Dynamic defaults" is used.
(<TO>.DynamicDefaults.Jerk)
Done OUTPUT BOOL FALSE TRUE Zero velocity reached
The job is being executed.
CommandAborted OUTPUT BOOL FALSE TRUE During execution the job was aborted by
Error OUTPUT BOOL FALSE TRUE An error occurred during execution of the
job. The job is rejected. The cause of the
error can be found in the "ErrorID" parame-
Error ID (Page 386) for parameter "Error"
Braking an axis with "MC_Halt"
Proceed as follows to decelerate an axis to a standstill:
1. Check the requirements indicated above.
2. Supply the parameters "Deceleration" and "Jerk" with the desired values.
3. Start the "MC_Halt" job with a positive edge at the parameter "Execute".
The current motion state is indicated in "Busy", "Done" and "Error". The standstill of the axis
is indicated under "Technology object > Diagnostics > Status and error bits > Motion status >
Standstill" (<TO>.StatusWord.X7 (Standstill)).
An option for the evaluation of the individual status bits can be found in the Evaluating
StatusWord, ErrorWord and WarningWord (Page 175) section.
 Loading...
Loading...






