Commissioning Manual
444 6FC5397-4EP10-0BA8, 07/2018
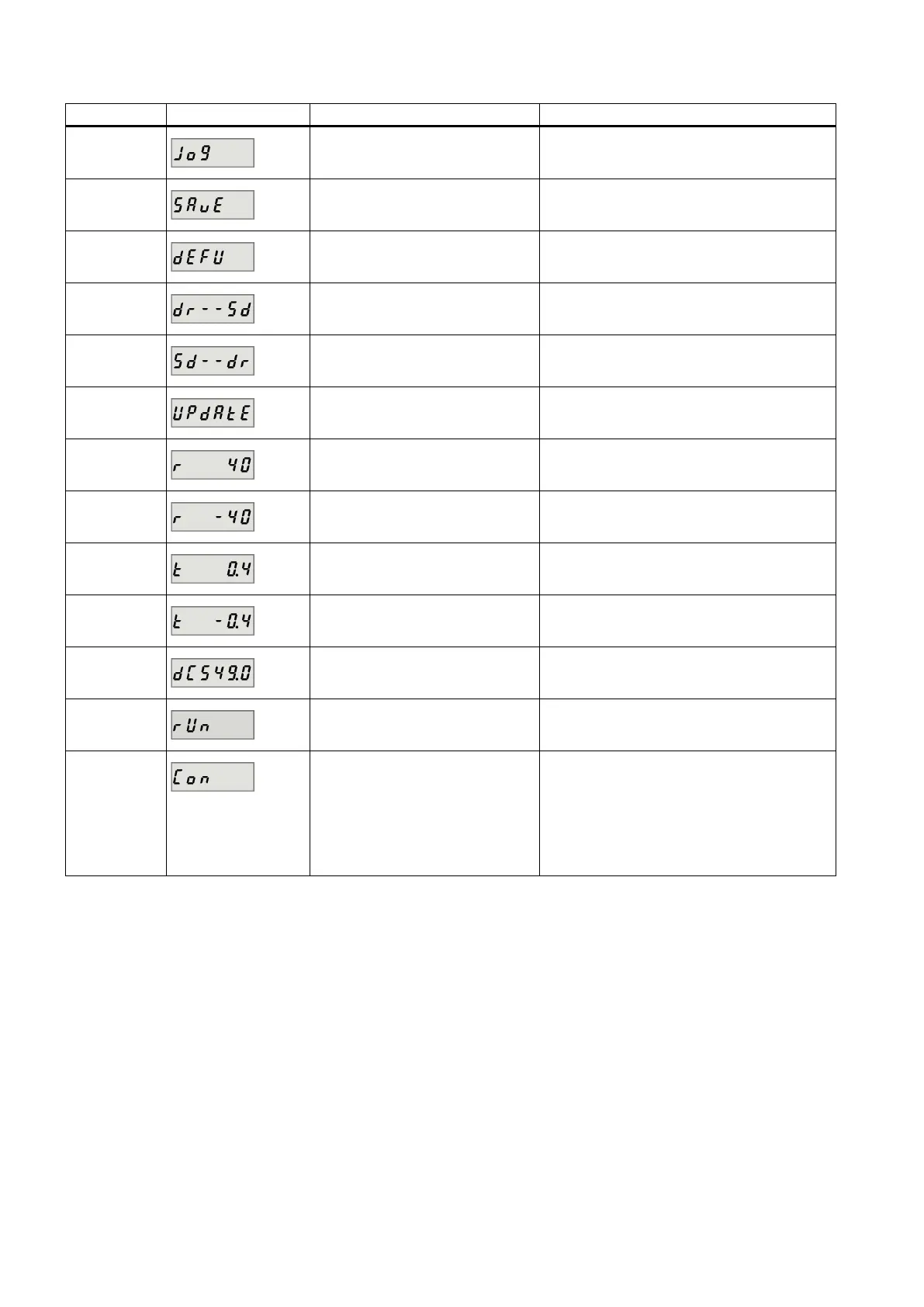
Jog
Jog function See Section "Jog (Page 449)".
Save
Save data in drive See Section "Saving parameter set in drive
(RAM to ROM) (Page 450)".
defu
Restore drive to default settings See Section "Setting parameter set to default
(Page 450)".
dr--sd
Save data from drive to SD card See Section "Transferring data (drive to SD
card) (Page 451)".
sd--dr
Upload data from SD card to drive See Section "Transferring data (SD card to
drive) (Page 451)".
Update
Update firmware See Section "Updating firmware (Page 452)".
r xxx
Actual speed (positive direction) -
r -xxx
Actual speed (negative direction) -
T x.x
Actual torque (positive direction) -
T -x.x
Actual torque (negative direction) -
DCxxx.x
Actual DC link voltage -
run
The motor is running -
Con
The Drive Bus communication
between the NC and the servo
drive is established. In this case,
the BOP is protected from any
operations except clearing alarms
and acknowledging faults.
-

 Loading...
Loading...









