6 Pro
rammin
the control
6
03/2006
6.9 Axes and spindles
6-105
© Siemens AG 2006 All Rights Reserved
SINUMERIK 840D/810D Start-Up Guide (IADC) – 03/2006 Edition
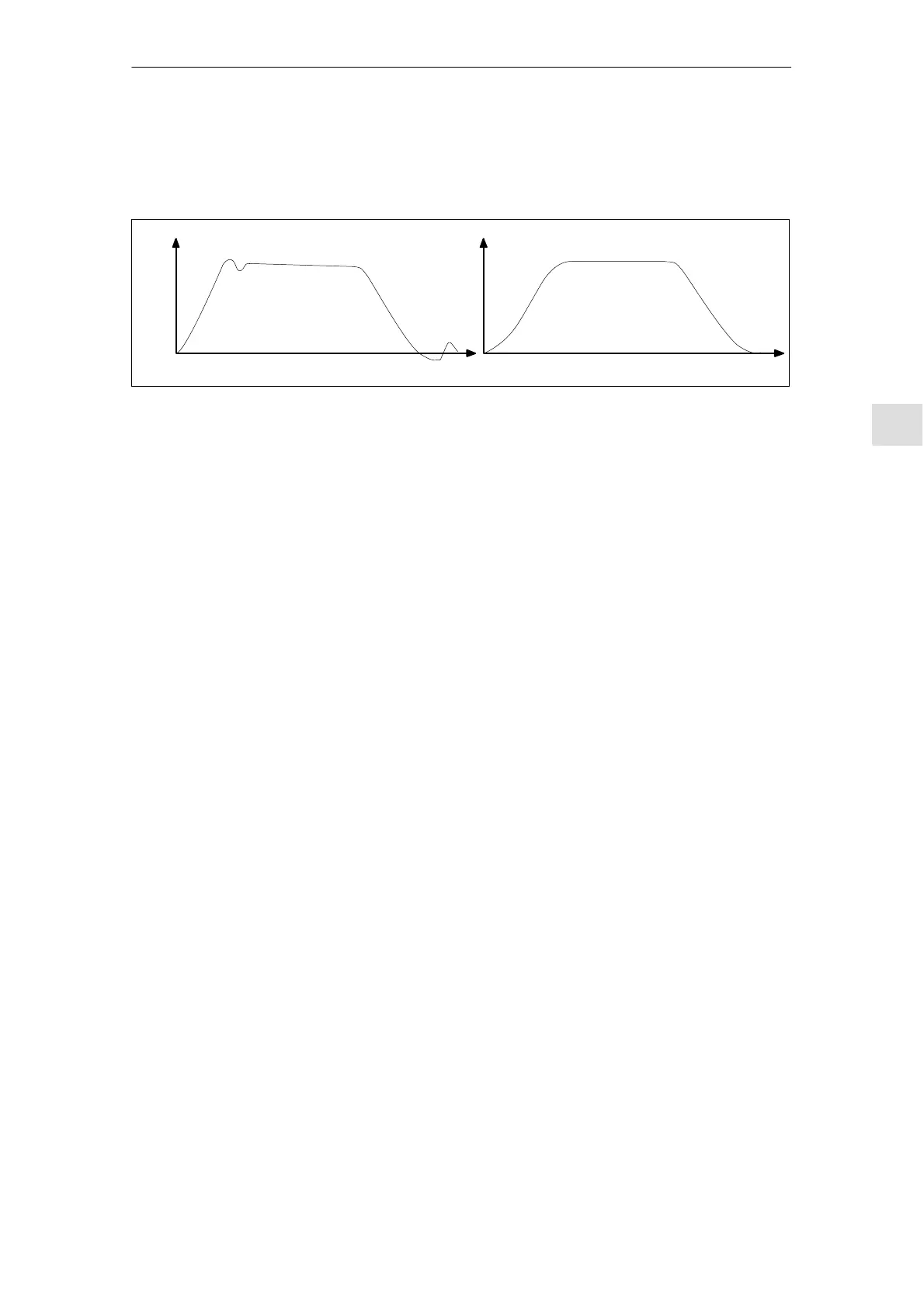
A storage oscilloscope or the start-up software SIMODRIVE 611D/
start-up/drives/servo/servo trace is used to check the positioning response at
different velocities. The speed setpoint is recorded for this purpose.
n
setpt.
[V]
t [ms]
n
setpt.
[V]
t [ms]
”bad”
selected Kv factor
”good”
selected Kv factor
Fig. 6-16 Speed setpoint curve
No overshoots may occur while the drive is approaching the static states; this
applies to all speed ranges.
The start-up software SIMODRIVE 611D provides additional options for
checking the K
V
factor (e.g. frequency response measurement, scanning the
speed and position control loops).
S K
V
factor is set too high
S Acceleration too high (current limit is reached)
S Rise time too long (re-optimization necessary)
S Mechanical backlash
S Mechanical components canted
For reasons of safety, the K
V
factor should be set slightly lower than the
maximum permissible value.
The axes are accelerated and braked with the acceleration specified in
MD 32300: MAX_AX_ACCEL. This value should allow the axes to be
accelerated and positioned rapidly and accurately while ensuring that the
machine is not unduly loaded. The acceleration default settings are in the
0.5 m/s
2
to 2 m/s
2
range.
The acceleration data entered can be either empirical values or the maximum
permissible acceleration values which the user must calculate. The data must
always be checked after entry for which the SIMODRIVE 611D start-up software
and an oscilloscope are required.
MD 32300: MAX_AX_ACCEL
Overshoot-free acceleration and positioning with rapid traverse velocity under
maximum load (heavy workpiece).
Via analog outputs (section 10) or start-up software for SIMODRIVE 611D.
Checking the posi-
tioning response
Reasons for over-
shooting in the posi-
tion control loop
Acceleration
Checking and
calculating
acceleration
values
Setting
Identification
Measurement

 Loading...
Loading...







