Control Constants
10-2
10.1 User Constants
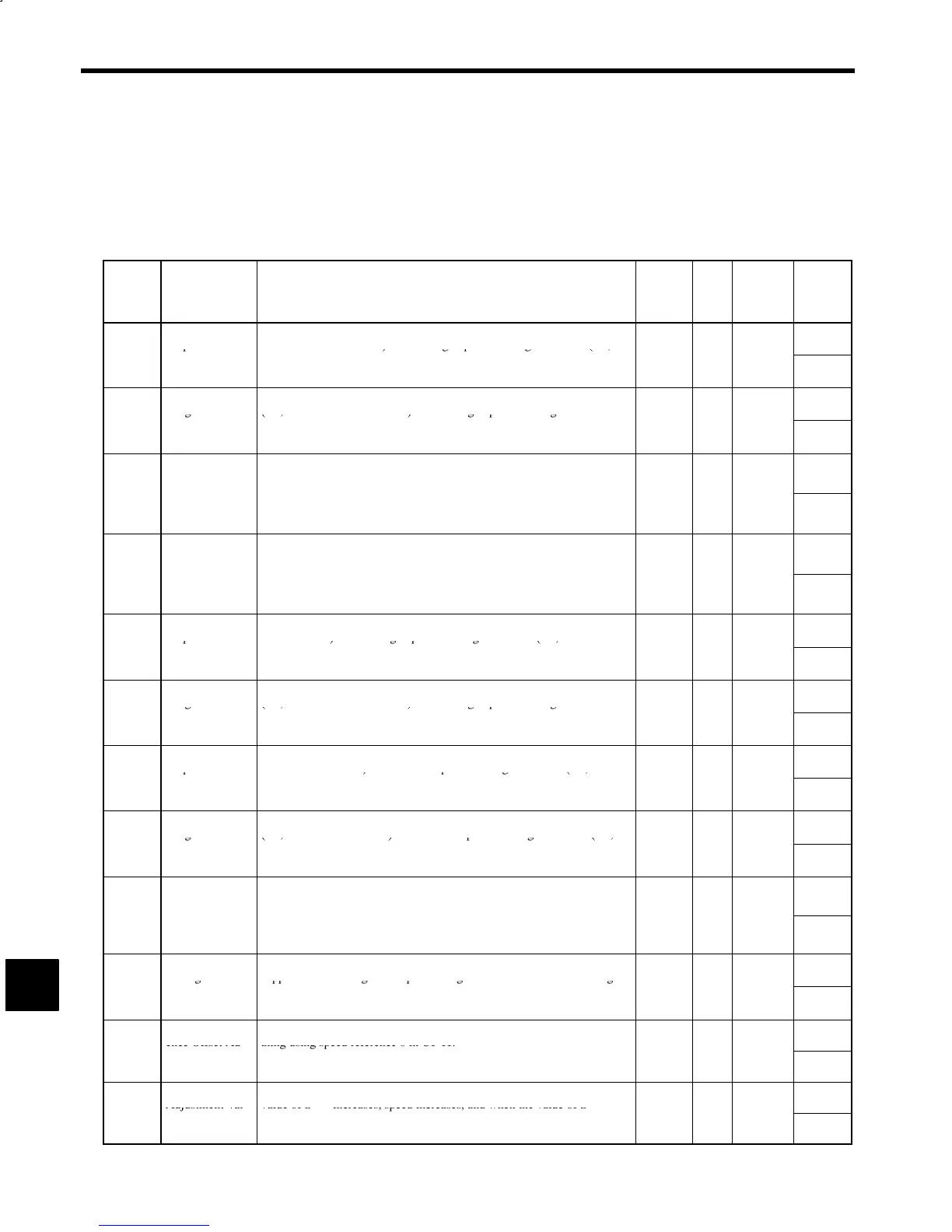
The user constants are listed in the following table.
Table 10.1 User Constants
Con-
stant
No.
Name Explanation Change
*
1
Unit Standard
Setting
Upper
Limit/
Lower
Limit
Speed Control
Proportional
Speed control proportional gain when high-speed gear is selected (i.e.,
MGR and LGR are OFF) or when high-speed winding is selected (i.e.,
255
C1-01
Gain (H)
K
VHN
CHW is OFF). Increasing K
VHN
increases rigidity
.
Torque reference P = K
VHN
×
Speed tolerance
Yes %/Hz 30
1
Speed Control
Integral Time
Speed control integral time constant when high-speed gear is selected
(i.e., MGR and LGR are OFF) or when high-speed winding is selected
1000
C1-02
(H)
τ
VHN
(i.e., CHW is OFF). Reducing τ
VHN
quickens response.
Torque reference I = Torque reference P
×
Time/τ
VHN
Yes ms 600
5
Speed Control
Proportional
Speed control proportional gain when low-speed is selected (i.e., MGR
or LGR is ON) or when low-speed winding is selected (i.e., CHW is
255
C1-03
,
K
VLN
.
Increasing K
VLN
increases rigidity.
Torque reference P = K
VLN
×
Speed tolerance
Yes %/Hz 30
1
Speed Control
Integral Time
Speed control integral time constant when low-speed gear is selected
(i.e., MGR or LGR is ON) or when low-speed winding is selected (i.e.,
1000
C1-04
,
τ
VLN
.
Reducing τ
VLN
quickens response.
Torque reference I = Torque reference P
×
Time/τ
VLN
Yes ms 600
5
Speed Control
Proportional
Speed proportional gain when high-speed gear is selected (i.e., MGR and
LGR are OFF) or when high-speed winding is selected (i.e., CHW is
255
C1-05
Gain (H)
K
VHS
OFF) in servo mode (i.e., SV is ON).
Torque reference P = K
VHS
×
Speed tolerance
Yes %/Hz 40
1
Speed Control
Integral Time
Speed control integral time constant when high-speed gear is selected
(i.e., MGR and LGR are OFF) or when high-speed winding is selected
1000
C1-06
Constant (H)
τ
VHS
(i.e., CHW is OFF) in servo mode (i.e., SV is ON).
Torque reference I = Torque reference P
×
Time/τ
VHS
Yes ms 100
5
Speed Control
Proportional
Speed control proportional gain when low-speed gear is selected (i.e.,
MGR or LGR is ON) or when low-speed winding is selected (i.e., CHW
255
C1-07
Gain (M, L)
K
VLS
is ON) in servo mode (i.e., SV is ON).
Torque reference P = K
VLS
×
Speed tolerance
Yes %/Hz 40
1
Speed Control
Integral Time
Speed control integral time constant when low-speed gear is selected
(i.e., MGR or LGR is ON) or when low-speed winding is selected (i.e.,
1000
C1-08
Constant (M, L)
τ
VLS
CHW is ON) in servo mode (i.e., SV is ON).
Torque reference I = Torque reference P
×
Time/τ
VLS
Yes ms 100
5
Torque Refer-
ence
Time constant of low-pass filter for torque reference for gear chattering
noise. Increasing the time constant may cause run-away depending on
5.0
C1-09
er
me
Constant
τ
T
con
ons.
Yes ms 1.0
0.0
Soft Start Time
Setting T
SFS
Setting of time required for soft starter. Variations in speed references are
suppressed according to the speed change ratio of the set time. Starting
180.0
C1-10
time from at rest state is obtained as follows:
Starting time = T
SFS
×
Speed reference (%)/100
Yes sec 0.1
0.1
*
Speed Refer-
ence Offset Ad-
Offset adjustment to analog reference. Set the value of U1-15 when oper-
ating using speed reference 0 in C1-11.
80
C1-11
justment Value
SC
OFS
Yes --- 0
−80
*
Motor Speed
Adjustment Val-
Constant to adjust motor speed over analog speed reference. When the
value of S
ADJ
increases, speed increases, and when the value of S
ADJ
1.1000
C1-12
ue
S
ADJ
decreases, speed decreases. Disabled when using digital speed reference.
Yes --- 1.0000
0.9000
10
 Loading...
Loading...









