10.1 User Constants
10-3
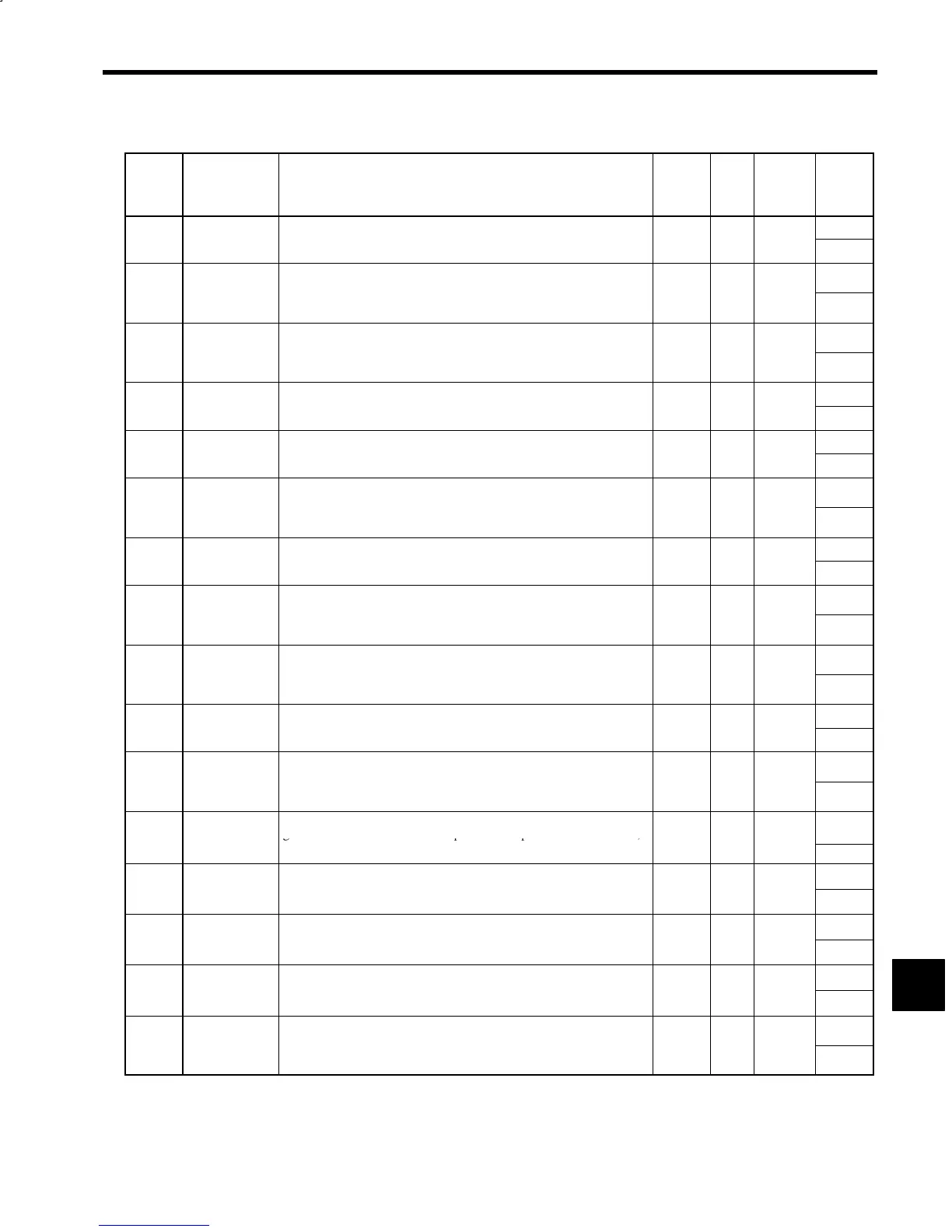
Table 10.1 User Constants (continued)
Con-
stant
No.
Name Explanation Change
*
1
Unit Standard
Setting
Upper
Limit/
Lower
Limit
C1-13
--- ---
---
to
C1-15
--- --- ---
---
*
Speedometer
Si
nal Ad
ust-
Constant to finely adjust the speed signal so that the actual speed and
s
eedometer dis
la
a
ree. When the value of SM
ADJ
increases,
1.50
C1-16
ment Value
SM
ADJ
.
,
speedometer indication also increases. A 10-V output is the standard
value at rated speed (C1-26).
Yes --- 1.00
0.90
*
Load Meter Sig-
nal Ad
ustment
This constant makes fine adjustments so that the torque reference and
the load meter dis
la
a
ree. When the value of LM
ADJ
increases, meter
1.50
C1-17
Value
LM
ADJ
.
,
needle indication also increases. A 10-V output is the standard value at
120% of rated torque for 30 min.
Yes --- 1.00
0.90
*
Load Factor
Sets the load meter full scale value when continuous torque is taken to
500
C1-18
Meter Fu
Sca
e
LM
FS
e 100
.T
efu
sca
eva
ue
epen
s on mac
ne spec
f
cat
ons.
Yes % 200
120
Zero Speed
Detection level of zero-speed signal (ZSPD). Standard setting is 30
−1
−
60
C1-19
Detect
on Leve
ZS
LVL
m
n
−
.
Yes min
−
30
3
Speed Agree
Si
nal Detection
Detection width of speed-agree signal at rated speed. Standard setting is
15%.
50
C1-20
Width
AGR
BD
.
Yes % 15
10
Speed Detection
Speed detection signal (SDET) activation level used for winding selec-
100
C1-21
S
gna
Leve
SD
LVL
t
on. Expresse
as a percent of t
e motor rate
spee
C1-26
.
Yes % 10
0
Speed Detection
Si
nal Detection
Hysteresis width adjustment level of speed signal detection. During
acceleration, SDLVL + SDHYS is detected. Durin
deceleration,
10.00
C1-22
Width
SD
HYS
,
.
,
SDLVL − SDHYS is detected. Expressed as a percent of the motor rated
speed (C1-26).
Yes % 1.00
0.00
Torque Detec-
tion Si
nal O
-
Torque detection signal (TDET) activation level used to detect abnormal
loads. Ex
ressed as a
ercent of the 30-minute rated tor
ue. H
steresis
120
C1-23
eration Level
TD
LVL
.
.
width is limited to ±10%.
Yes % 10
5
External Control
Torque limit using external torque limit signals (TLL and TLH).
120
C1-24
Torque L
m
t
Level TL
EXT
Expresse
as a percent of t
e 30-m
nute rate
torque.
Yes % 10
5
Motor Code
Selection MTR
Select applicable motor from the motor codes stored in Inverter memo-
r
.Ex
ressed in 3-di
it hexadecimal
0toF
. When the motor code is
1FF
C1-25
.
.
changed, be sure to turn OFF the power once; and then turn it ON again
after verifying that the Digital Operator display has gone OFF.
No --- ---
001
C1-26
Rated Speed
S
100
Rated speed set according to load machine specifications. Must not be
greater than the motor maximum speed. When speed reference is 100%,
No min
−1
Max.
Max.
speed
this speed is applied.
speed
100
Gear Ratio 1
Gear ratio determined by mechanical specifications. This parameter is
2.5000
C1-27
R
HGR
va
w
en
gear
sse
ec
e
.e.,
an
are
.
Gear ratio = Load shaft speed ÷ Motor speed
No --- 1.0000
0.0400
Gear Ratio 2
Gear ratio determined by mechanical specifications. This parameter is
2.5000
C1-28
R
MGR
va
w
en
gear
sse
ec
e
.e.,
s
.
Gear ratio = Load shaft speed ÷ Motor speed
No --- 1.0000
0.0400
Gear Ratio 3 (L)
Gear ratio determined by mechanical specifications. This parameter is
2.5000
C1-29
LGR
va
w
en
gear
sse
ec
e
.e.,
s
.
Gear ratio = Load shaft speed ÷ Motor speed
No --- 1.0000
0.0400
Motor Flux
Lower Limit
Set value of motor flux lower limit level at reduction control
100
C1-30
Level
φ
WL
No % 15
15
10
 Loading...
Loading...









