8-88
IM 05P01C31-01EN
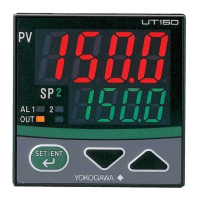
PVDerivativeTypePID(outputbumplessatSPchange)
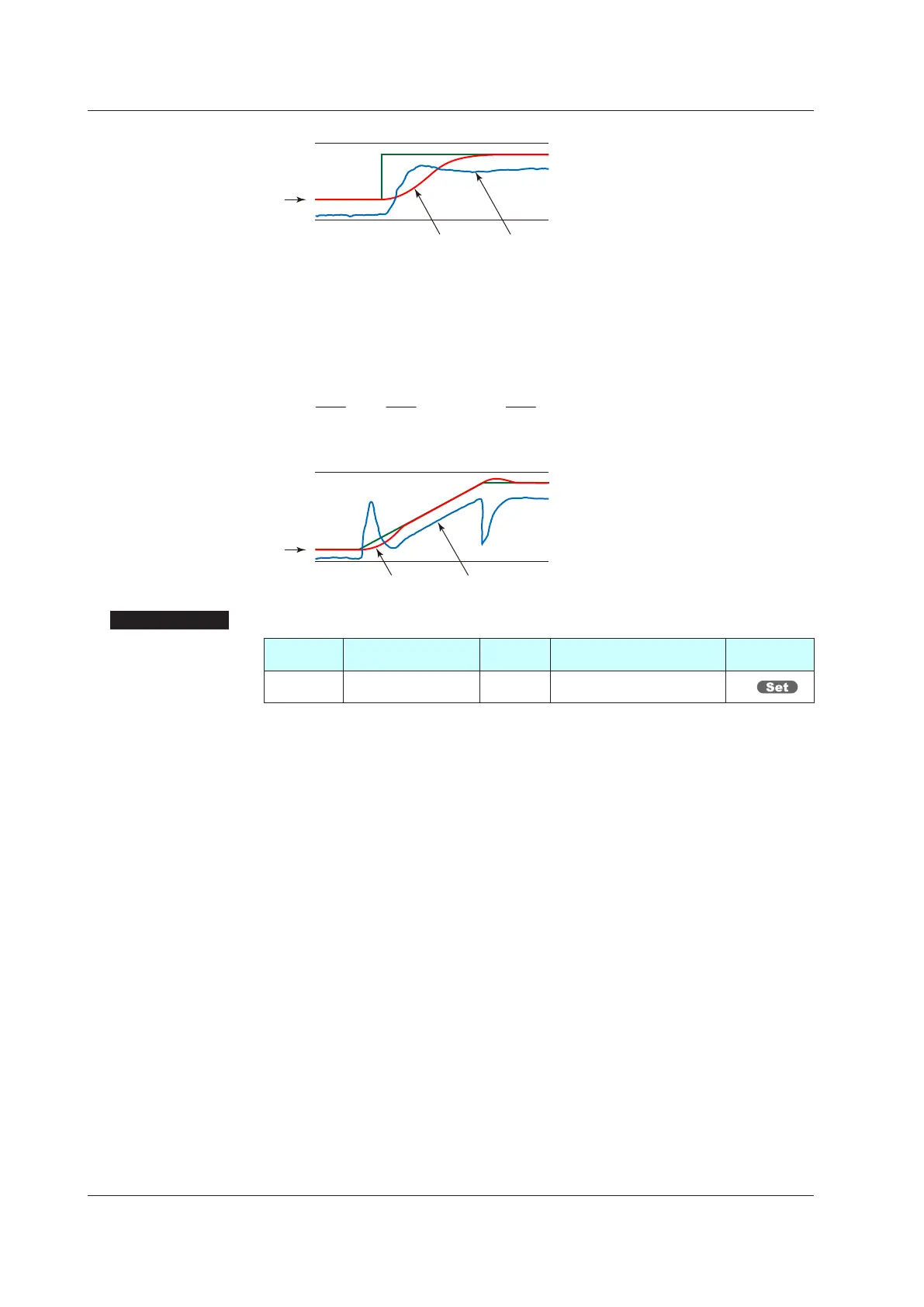
DeviationDerivativeTypePID
ThePIDcontrolmethodinwhichderivativeactionworksforthedeviationvalue=PV–
SP.
The derivative action works for a SP change, so this method is useful for cases like
Cascade secondary-loop control where the SP-following capability is important.
The following shows the deviation derivative type PID control computation formula.
e e
P
OUT
+ +dt Td e
=
100
Ti
1
dt
d
∫
• •
whereOUT:controloutput,e:deviation(PV-SP),P:proportionalband,Ti:integraltime,
and Td: derivative time
Setting Details
Parameter
symbol
Name
Display
level
Setting range Menusymbol
ALG PID control mode PRO
0: Standard PID control mode
1: Fixed-point control mode.
CTL
8.3SettingPIDControlMode(ALG)

 Loading...
Loading...