8-87
IM 05P01C31-01EN
Control Functions
8.3 SettingPIDControlMode(ALG)
Description
There are two PID control modes: standard PID control mode and fixed-point control
mode.
Select a PID control computation formula shown in the following table according to the
control mode or operation mode.
Single-loop
Control,Loop
ControlforBackup,LoopControlwithPVSwitching,Loop
ControlwithPVAuto-selector,andLoopControlwithPV-holdFunction.
Operationmode
AUTO+Local AUTO+Remote
Standard PID control
mode
PVderivativetype
(output bump at SP change)
Deviation derivative type
Fixed-point control
mode
PVderivativetype
(output bumpless at SP change)
PVderivativetype
(output bump at SP change)
Cascade Primary-loop Control
Operationmode
Cascade+Local Cascade+Remote
Standard PID control
mode
PVderivativetype
(output bump at SP change)
Deviation derivative type
Fixed-point control
mode
PVderivativetype
(output bump at SP change)
PVderivativetype
(output bump at SP change)
Cascade Secondary-loop Control
Operationmode
AUTO+Local AUTO+Remote Cascade
Standard PID control
mode
PVderivativetype
(output bump at SP change)
Deviation derivative type Deviation derivative type
Fixed-point control
mode
PVderivativetype
(output bumpless at SP change)
PVderivativetype
(output bump at SP change)
PVderivativetype
(output bump at SP change)
PVDerivativeTypePID
ThisisaPIDcontrolmethodinwhichthederivativeactionworksonlyonthePV.
It can also eliminate output bump due to SP changing operation in Local mode.
Thefollowingshows
thePVderivativetypePIDcontrolcomputationformula.
e e
P
OUT
+ +dt Td ΔPV
=
100
Ti
1
dt
d
∫
• •
whereOUT:controloutput,e:deviation(PV-SP),P:proportionalband,Ti:integraltime,
Td:derivativetime,and∆PV:PVn-PVn-1(n-1:valuebeforeonecontrolperiod)
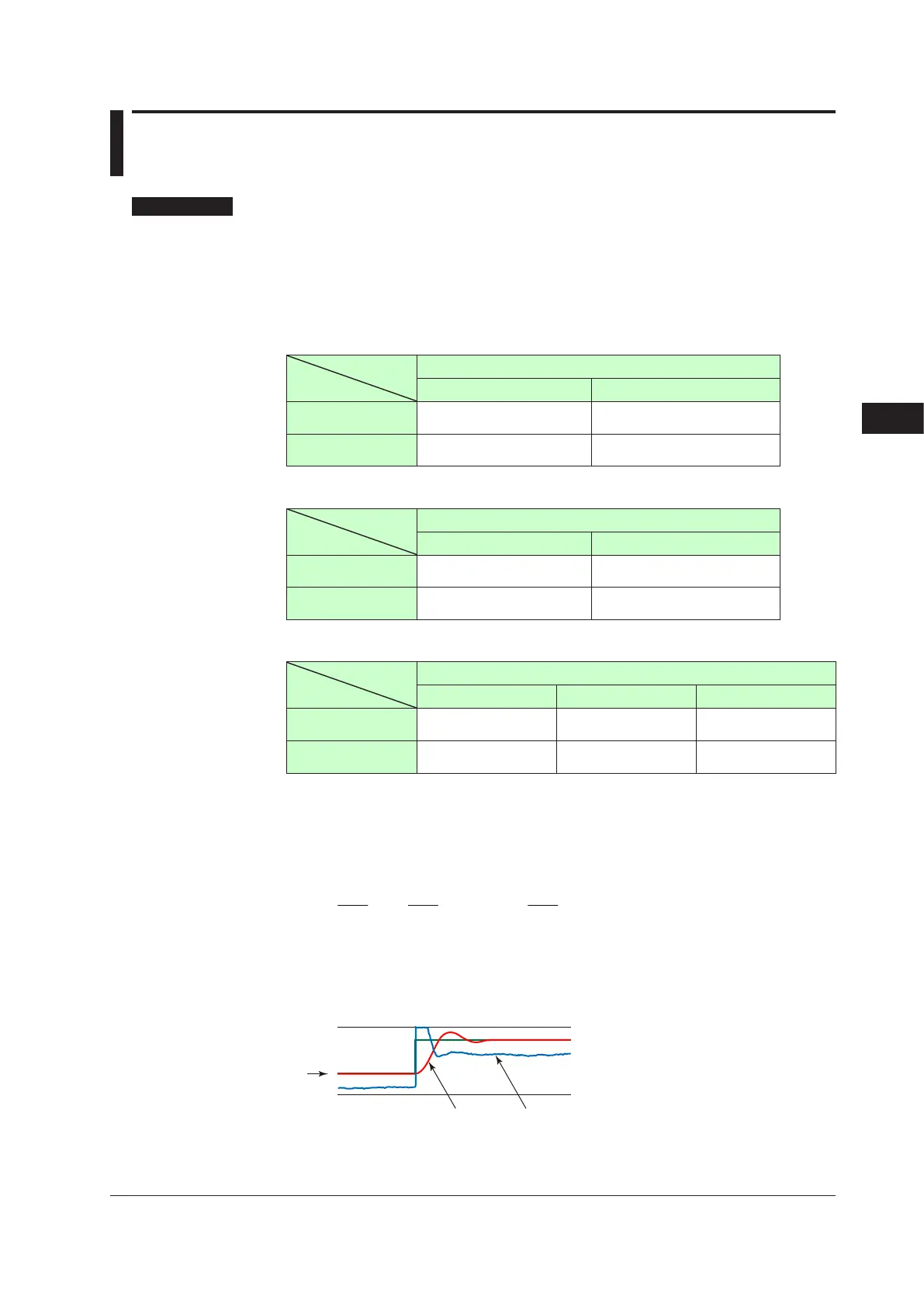
PVDerivativeTypePID(outputbumpatSPchange)
8

 Loading...
Loading...