Component
Description
A Reach axis
Moves the grip horizontally 11.25 in (28.5 cm) to 19.75 in
(50.1 cm) from the center of the robot post.
B Wrist mechanism
Rotates materials to either the portrait or landscape positions,
where the range of motion is ±135° (270° total).
C Grip
Consists of two sets of fingers that grip the consumable. The
fingers close to grasp a consumable and open to release it.
D
Robot
tower/vertical axis
Moves the arm up and down 21.5 in (54.6 cm), from 6.5 in
(16.5 cm) to 28 in (71.1 cm) above the table.
E Rotary axis
Rotates the arm 340° around the base of the Twister
™
Robot.
Mechanical stops prevent continuous rotation.
F Bar code reader
Scans the bar codes of consumables as they are loaded into
the QuantStudio
™
7 Flex System.
G Base cover
Removable cover that contains four access bolts, which secure
the Twister
™
Robot to the Sciclone ALH 3000 base.
H Racks
Provide storage for PCR consumables before and after they
are run by the QuantStudio
™
7 Flex System (one of three
shown).
I Power LED When lit, indicates the Twister
™
Robot is powered on.
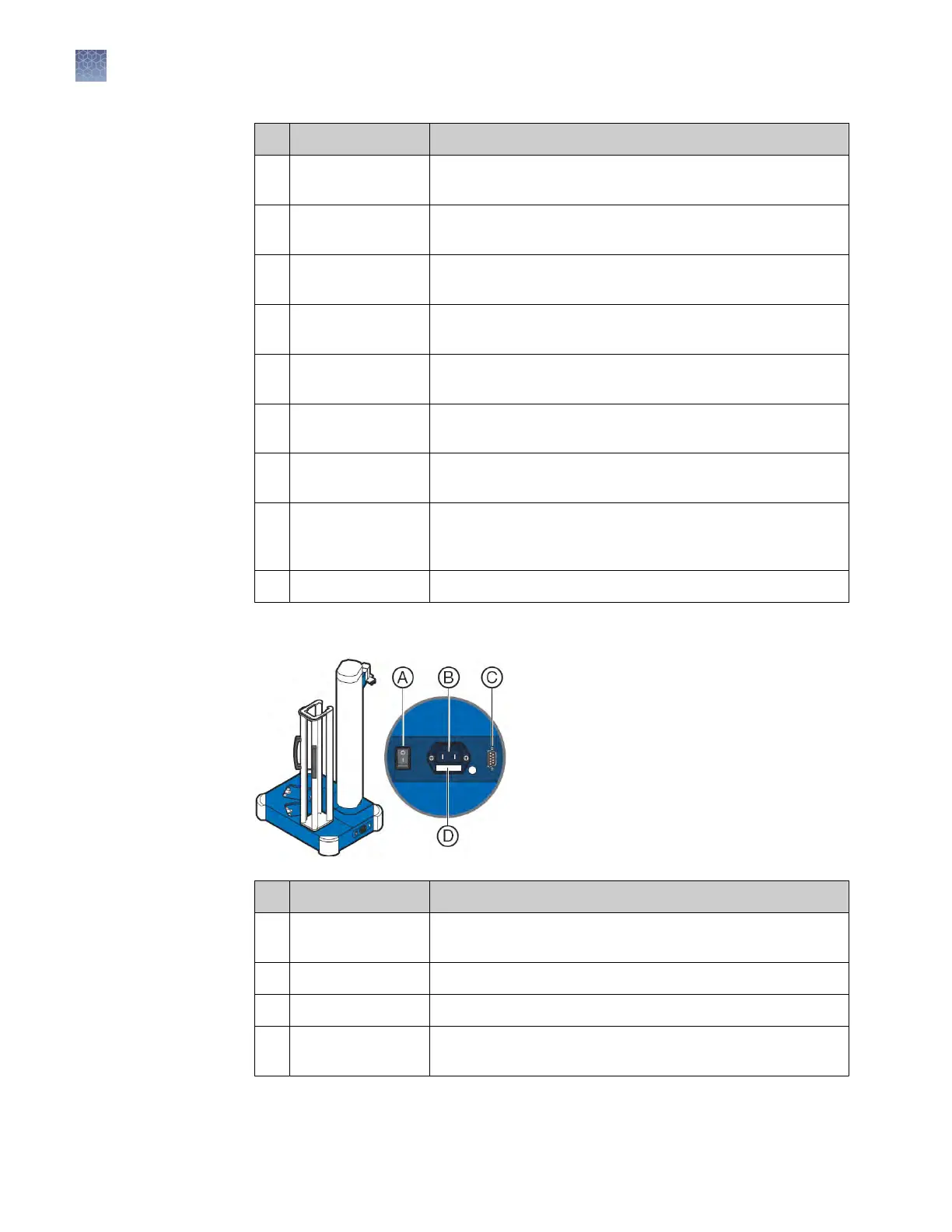
Rear view
Component
Description
A On/Off switch
Power switch for the Twister
™
Robot, wher
e the states are on
( | ) or off ( O ).
B Power port 100–240V port that provides power to the Twister
™
Robot.
C RS232 port Provides serial communication with the computer.
D Fuse cover
Two T1.6A 250VAC, 5 × 20‑mm electrical fuses that protect the
Twister
™
Robot from excessive electrical current.
Chapter 1 Getting started
Instrument hardware
1
20
QuantStudio
™
6 and 7 Flex Real-Time PCR Systems v1.6 Maintenance and Administration Guide