6.1.2. BUZZER
The buzzer is activated when an anomaly is detected during the passage sequence:
• Continuous sound Intrusion or prolonged presence in the security zone during opening/closing.
• Intermittent sound Fraud.
6.2. DETECTION
The SmartLane is mainly equipped with DIRAS detection cells, detection cells using Infra-Red, developed by Automatic Systems.
However, when the SmartLane is configured with 1200 mm high mobile obstacles, a classic E/R (transmitter/receiver) cell is
used as a safety device in the corresponding fixed obstacle. ( Fig. 41, page 43)
This type of classic cell will also be used when the SmartLane is equipped with the 'Early Detection' option.
( Fig. 41, page 43)
The DIRAS cells are arranged in strips of eight (8) Transmitter (( Fig. 42, page 43) and ( Fig. 44, page 44)) or Receiver
(( Fig. 43, page 43) and ( Fig. 45, page 44)) cells.
The transmitter cells are located in the left cabinet and the receiver cells in the right cabinet.
Each lane is equipped with at least 32 pairs of T/R cells (64 cells). The physical distance between two cells is approx. 45 mm
but thanks to the virtual beams created by the cross beams, this distance is reduced to 23 mm.
A
A
A
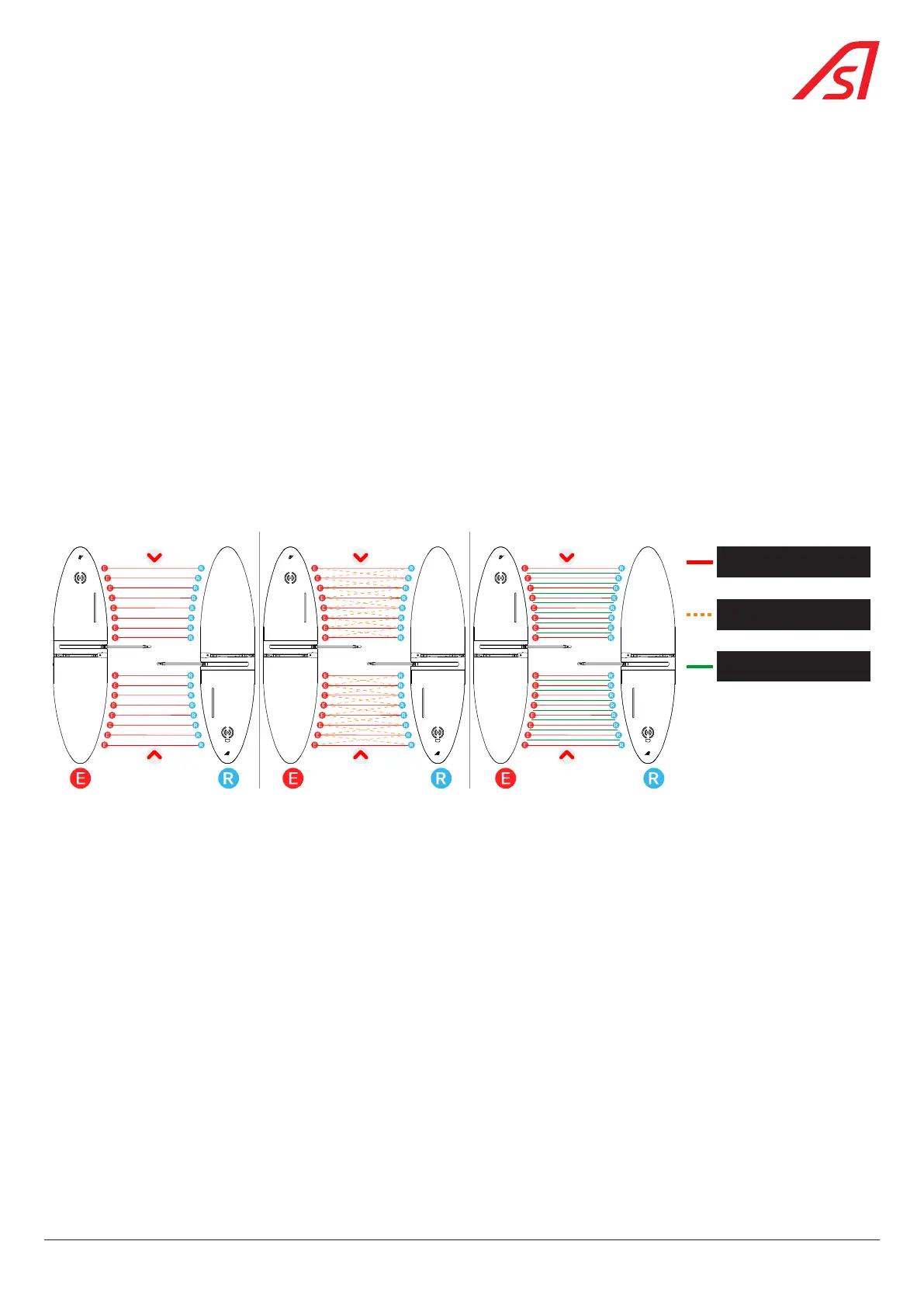
Direct beam
Cross beam
Virtual beam
Fig. 38 - Cross beam principle
This high cell density allows the use of a detection algorithm, called a tracking algorithm, which predicts the position of
the user and is able to detect objects/spaces greater than 23 mm (which is very small compared to commercially available
networks of cells). This algorithm manages passages and determines breaches based on the match between this prediction
and the cell masking sequence.
The advance leg tracking algorithm, combined with the location of the DIRAS and the high cell density, allows for:
• Effective tailgating detection;
• Trolleys have a specific signature that allows them to be differentiated from human beings;
• Detection of children of all sizes;
• Detection of U-turn before/after the obstacle;
• Detection of users moving in the wrong direction;
• Detection of crawling users (highly unlikely);
• Existence of a continuously active security zone (because there are no obstacles passing in front of the cells);
• Great reduction in false alarms due to luggage (because tracking is activated as soon as the lane is entered).
41
SmartLane