Microlab
®
STAR Service Manual
2-1
2 Microlab
®
STAR Instrument
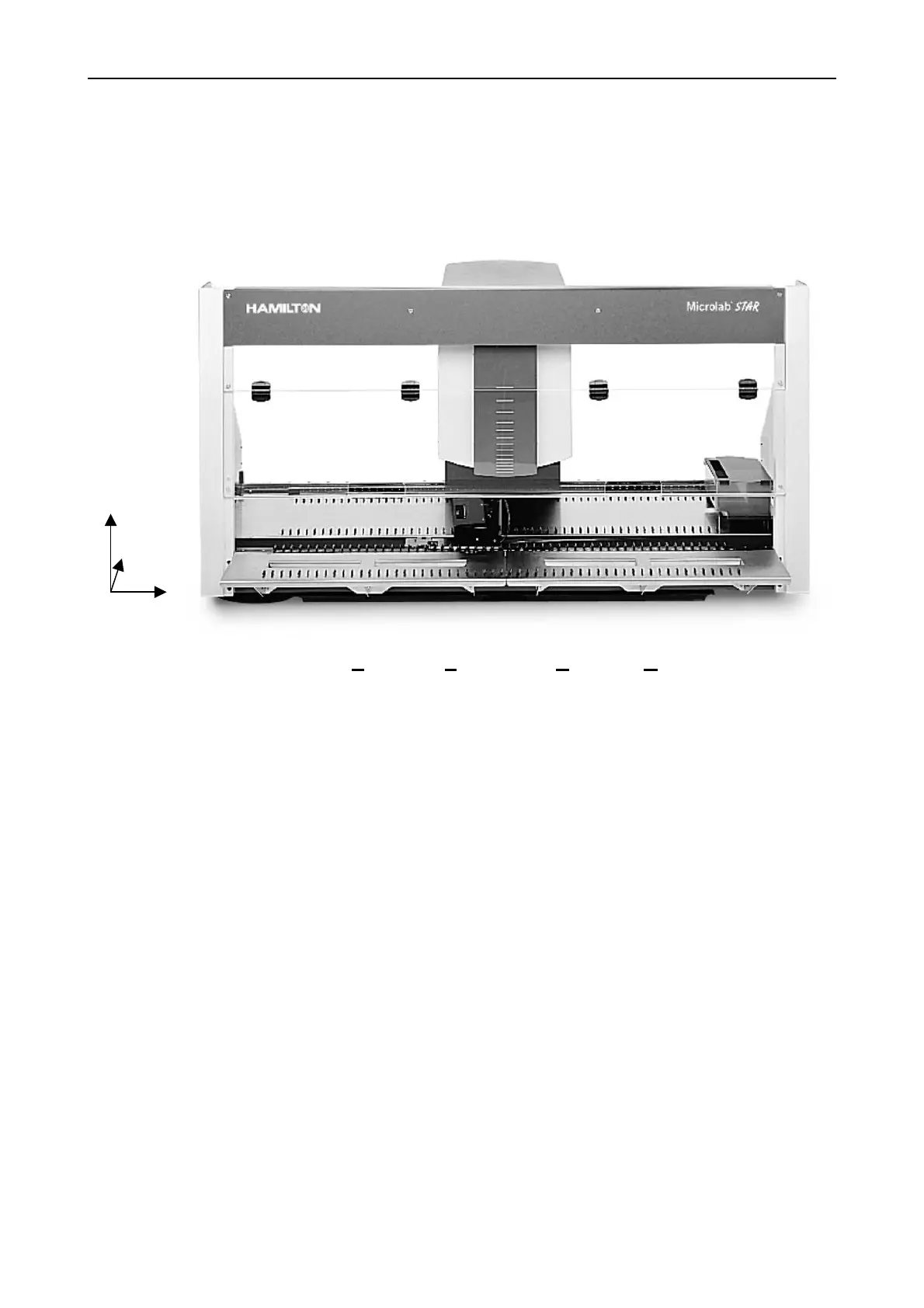
2.1 Overview
The Microlab
®
STAR is a Sequential Transfer and Aliquoting Robot and performs
pipetting operations on liquids in containers on the work surface.
Movable carriers, holding reagent containers, e.g. tubes, microtiter plates, or any
other kind of laboratory material are placed on the deck (work surface).
The work surface is divided into 54 tracks (T) of equal width for the purpose of
loading carriers. This means the deck has partitions for a maximum of 54
specialized 1-T carriers for sample tubes, or a maximum of 9 6-T carriers for
microtiter plates, or a mixture of both. An additional partition is provided for the tip
waste station.
The Microlab
®
STAR is equipped with a pipetting arm containing typically 4, 8, 12 or
16 pipetting channels which work independently. The pipetting arm moves in X-
direction, whereas each pipetting channel can move relatively independently both in
a Y- and a Z-direction. The Microlab
®
STAR supports pipetting with disposable tips
or with needles.
X
Z
Y