10. Navigation and guidance system
MiR250 Hook User Guide (en) 01/2023 - v.1.2 ©Copyright 2021-2023: Mobile Industrial Robots A/S. 102
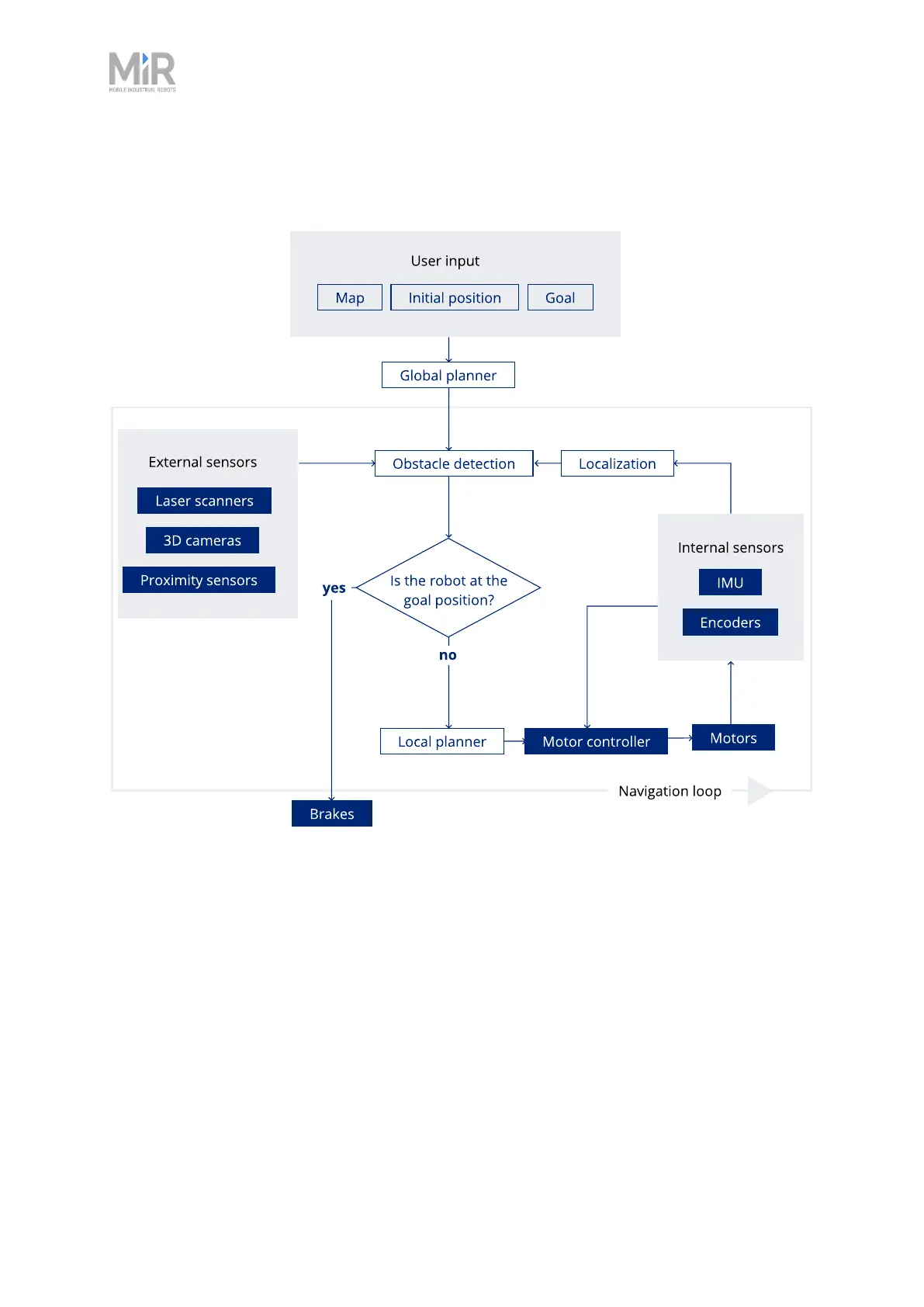
Figure 10.1 Flow chart of the navigation and control system. The user provides the necessary input for the
robot to generate a path to the goal position. The robot executes the steps in the navigation loop until it
reaches the goal position and stops by engaging the brakes.
10.2 User input
To enable the robot to navigate autonomously, you must provide the following:
• A map of the area, either from a .png file or created with the robot using the mapping
function—see "Creating and configuring maps" on page147.
• A goal destination on that map—see "Markers" on page158.