18. Interface specifications
MiR250 Hook User Guide (en) 01/2023 - v.1.2 ©Copyright 2021-2023: Mobile Industrial Robots A/S. 261
18.2 Right side interfaces
This section describes the general purpose interfaces that are used to interface to the top module
on the right side of the robot.
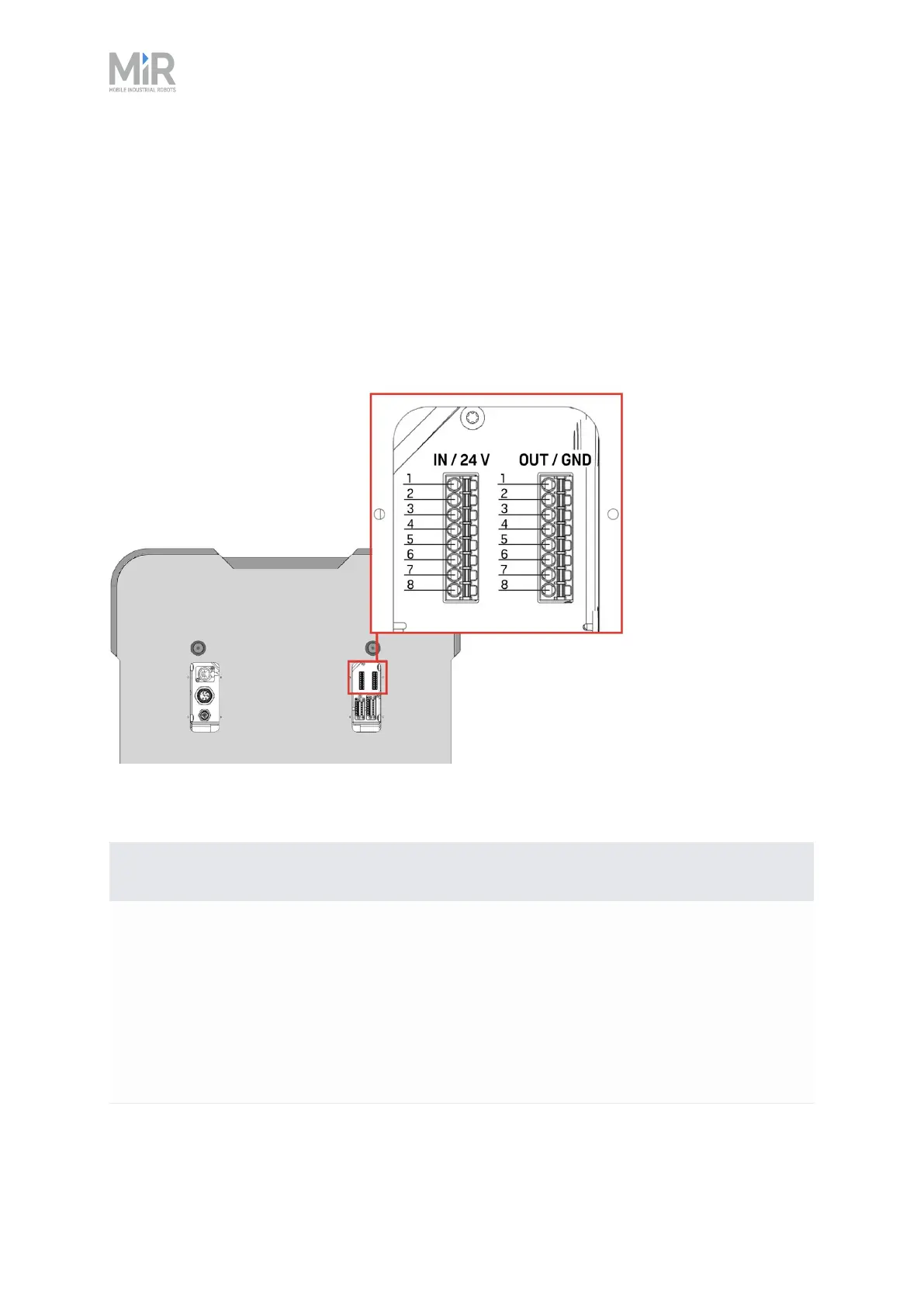
GPIO A and B
Figure 18.4 Pin numbers for the GPIOinterfaces.
Pin no. Description
1 Signal name: OUT1
Type: Output
Standard function: Output 1.
MiR Hook 250 function: Turns the hook computer on and off, when the robot
is turned on and off.
Table 18.4 Description of the pins in the output interface in Figure 18.2