19. Error handling
MiR250 Hook User Guide (en) 01/2023 - v.1.2 ©Copyright 2021-2023: Mobile Industrial Robots A/S. 272
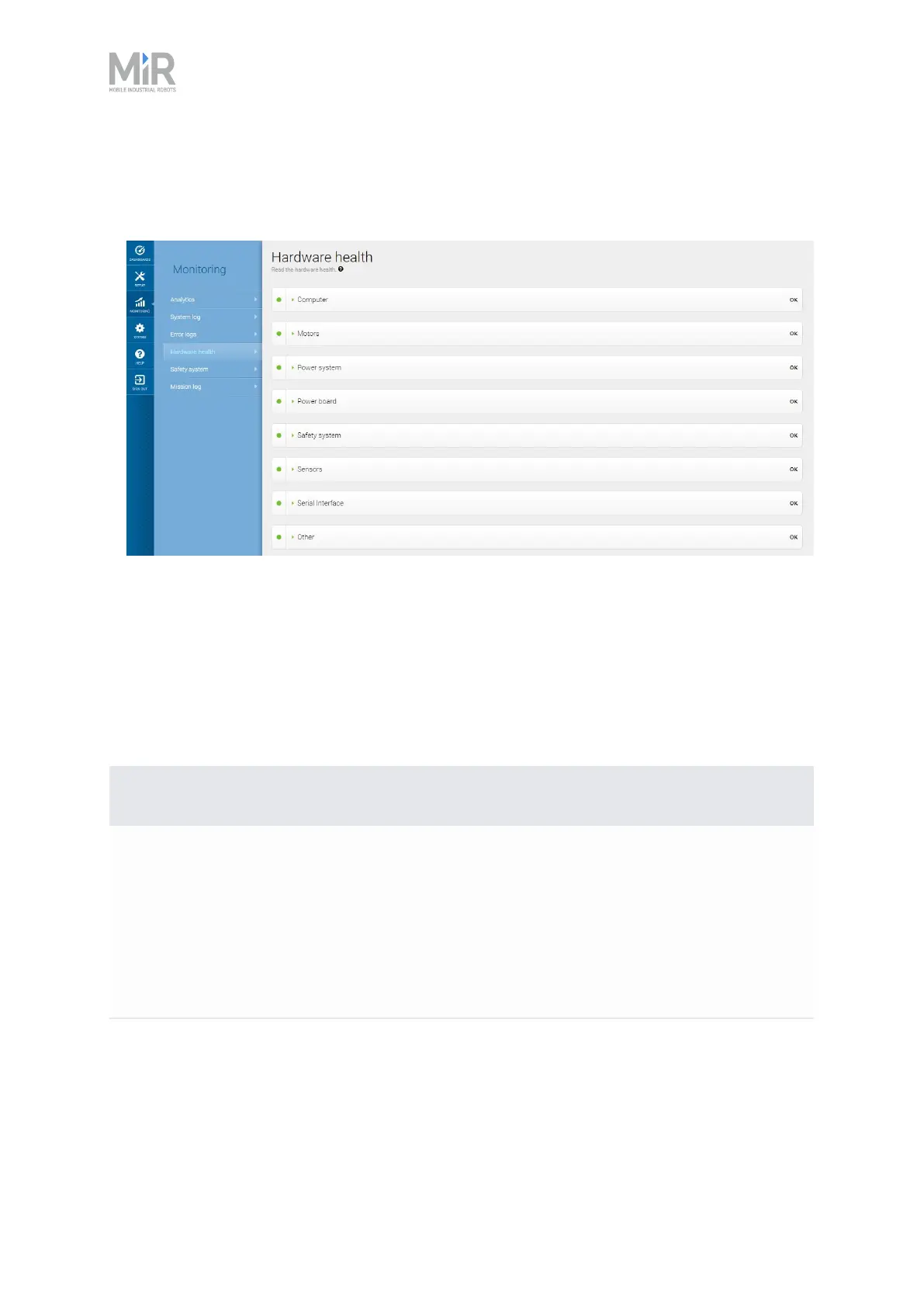
• Sign in to the robot interface and go to Monitoring >Hardware health. The interface displays
which component is failing and often for what reason. This can help identify the source of the
error. If an internal component is failing, turn off the robot, disconnect the battery, and have
the commissioner or operator visually check the internal component for obvious faults.
• For further troubleshooting, contact your distributor for the MiR troubleshooting guides and
the document Error codes and solutions.
19.3 Error codes and solutions
Code Type Solution
1001
SICK
(MiR500/MiR1000)
Robot is in Emergency
stop: xxx.
Hardware error.
Can resolve itself.
The safety system has detected a
fault in the robot.
Refer to the troubleshooting guide
Troubleshoot MiR250 going into
Emergency or Protective stop due to
safety system error
Table 19.1 Common error codes the robot reports