93
15.2. Outline of each function and starting methods
15.2.1. Outline of each function
Each monitor function is explained briefly in this section. The monitor functions are largely classified into the
following three groups.
1. Robot movement monitor ........…Items related to robot movement are monitored.
2. Signal monitor ……………………Items related to the state of the signal is monitored.
3. Operation monitor .......................Items related to the robot's operation are monitored.
4. Servo monitor..............................The robot's servo system information is monitored.
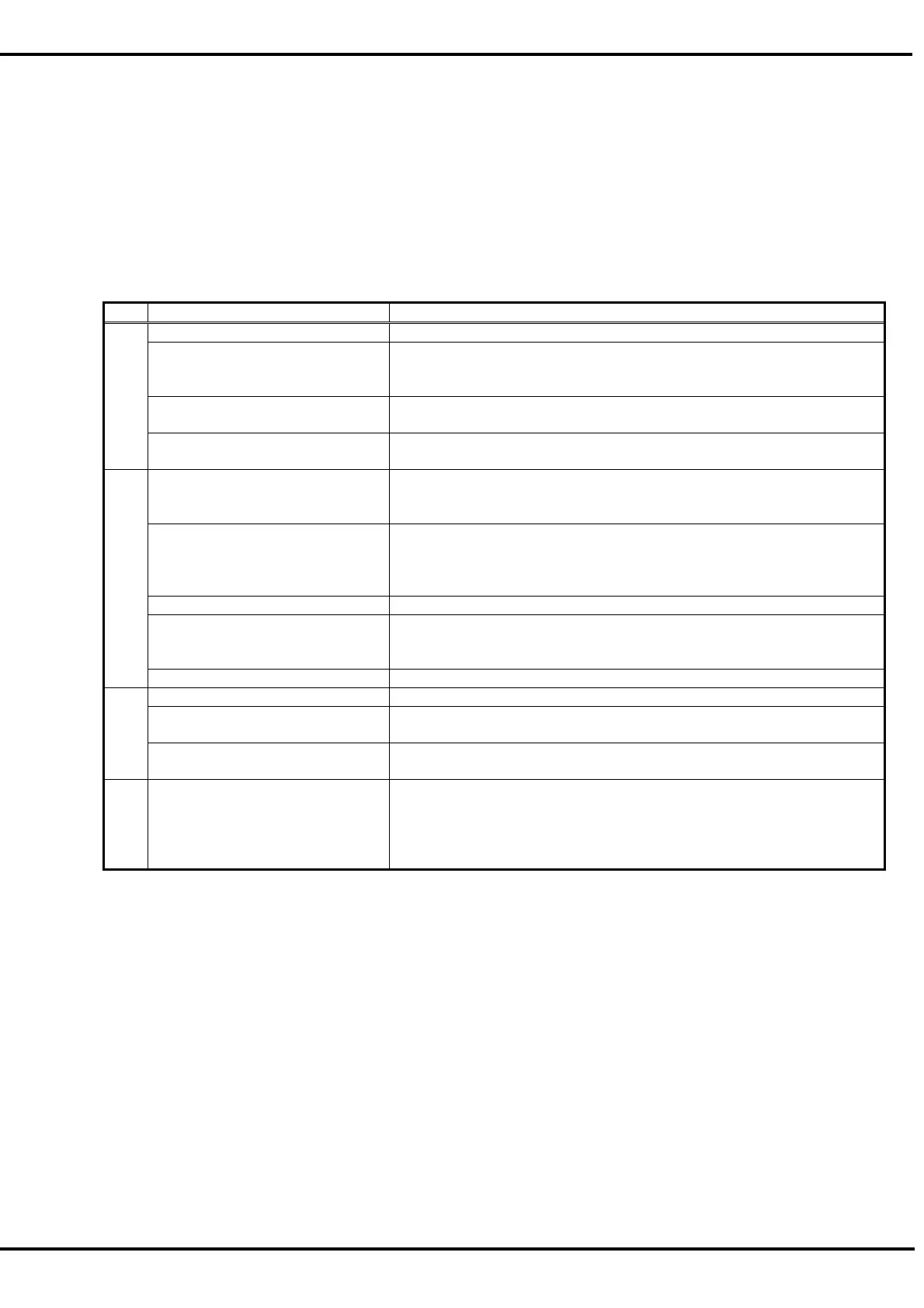
Monitor name Explanation
Slot run state The operation state of each slot can be confirmed.
Program monitor
The program execution line set for each slot, the contents of the
variable used in the program, and the robot current position, etc., can
be confirmed.
Movement State
The current position information and hand open/close state of each
connected mechanism can be confirmed.
Robot movement
monitor
Error
The currently occurring error can be confirmed.
The history of the errors that have occurred can be confirmed.
General-purpose signal
The state of the signal input from an external device to the robot
controller / output from the robot controller to an external device can
be confirmed.
Named signal
The status can be checked by naming the status of the dedicated I/O
signal that has been set in the robot controller, as well as each bit or
within the range of 32 bits of the general-purpose signal.
The signals are set via parameter setting (Parameter editor).
Stop signal The stop signal input into the robot controller can be confirmed.
Register
The input registers in the CC-Link function can be monitored and
pseudo-input, and the output registers in the CC-Link function can be
monitored and forcibly output.
Signal monitor
I/O unit monitor The XY devices of I/O unit can be monitored.
Operating hours The robot operation time (power ON, etc.) can be confirmed.
Production information
The operating time of the program in the robot controller and the No.
of program cycles can be confirmed.
Operation
monitor
Additional board information
Information on the option card mounted on the robot controller can be
referred to.
Servo
monitor
Servo monitor position, speed,
current, load, power
The servo system information can be monitored.

 Loading...
Loading...



