126
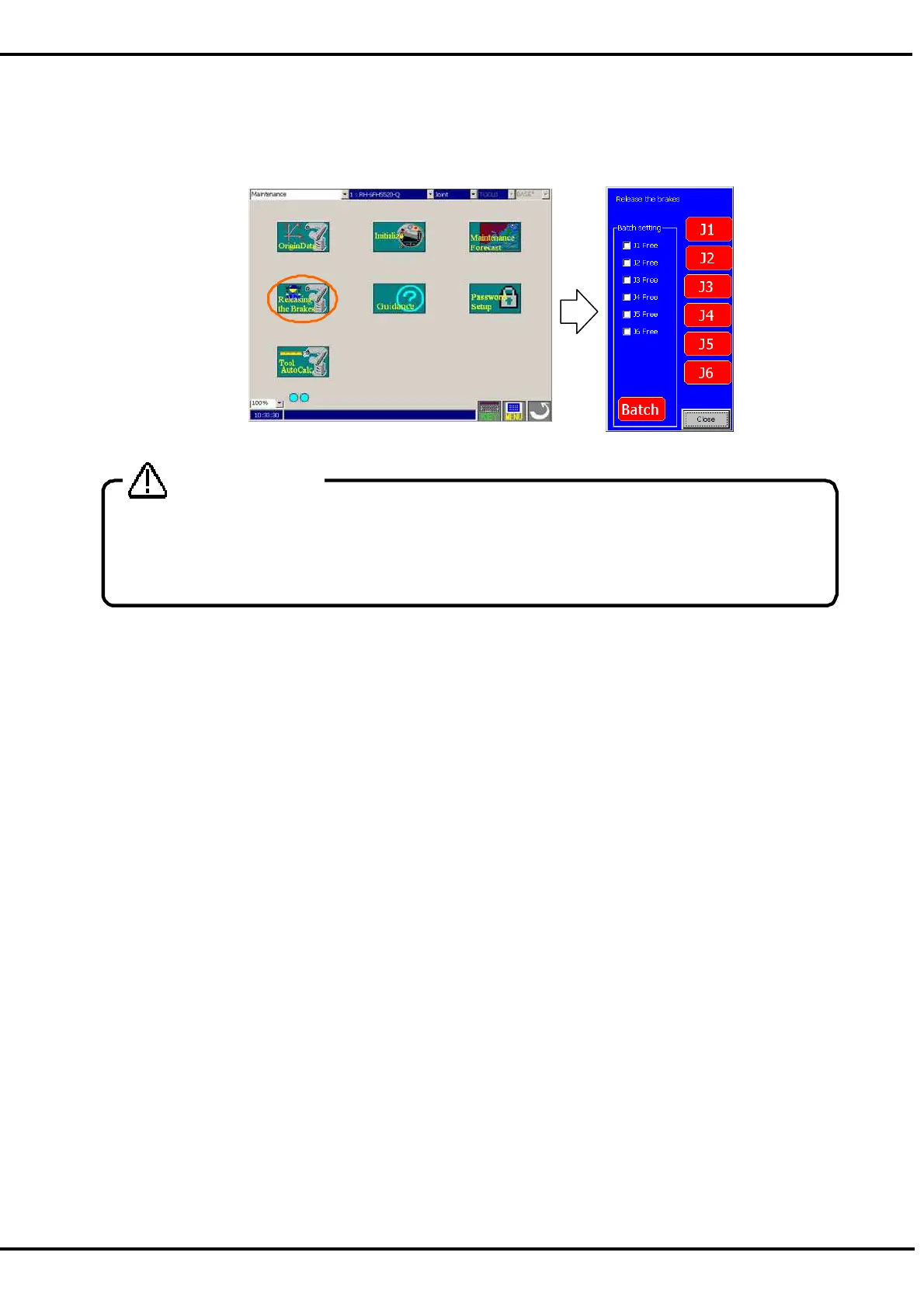
16.4. Releasing the brakes
This function releases the servomotor brakes when the servo is OFF.
This function is used to directly move the robot arm by hand, etc.
Due to the robot configuration, when the brakes are released, the robot arm will drop with its own
weight depending on the released axis.
Always assign an operator other than the T/B operator to prevent the arm from dropping. This
operation must be carried out with the T/B operator giving signals.
CAUTION

 Loading...
Loading...



