203
19.1.5.8. Current position data (the joint coordinate system)
The current position data of robot is displayed with each joint coordinate system axis.
If you want to display the current position data (the joint coordinate system) all together, please use "Variable"
type and set the Robot Status Variable "J_CURR". Please refer to
"19.1.5.3 Variable" for details.
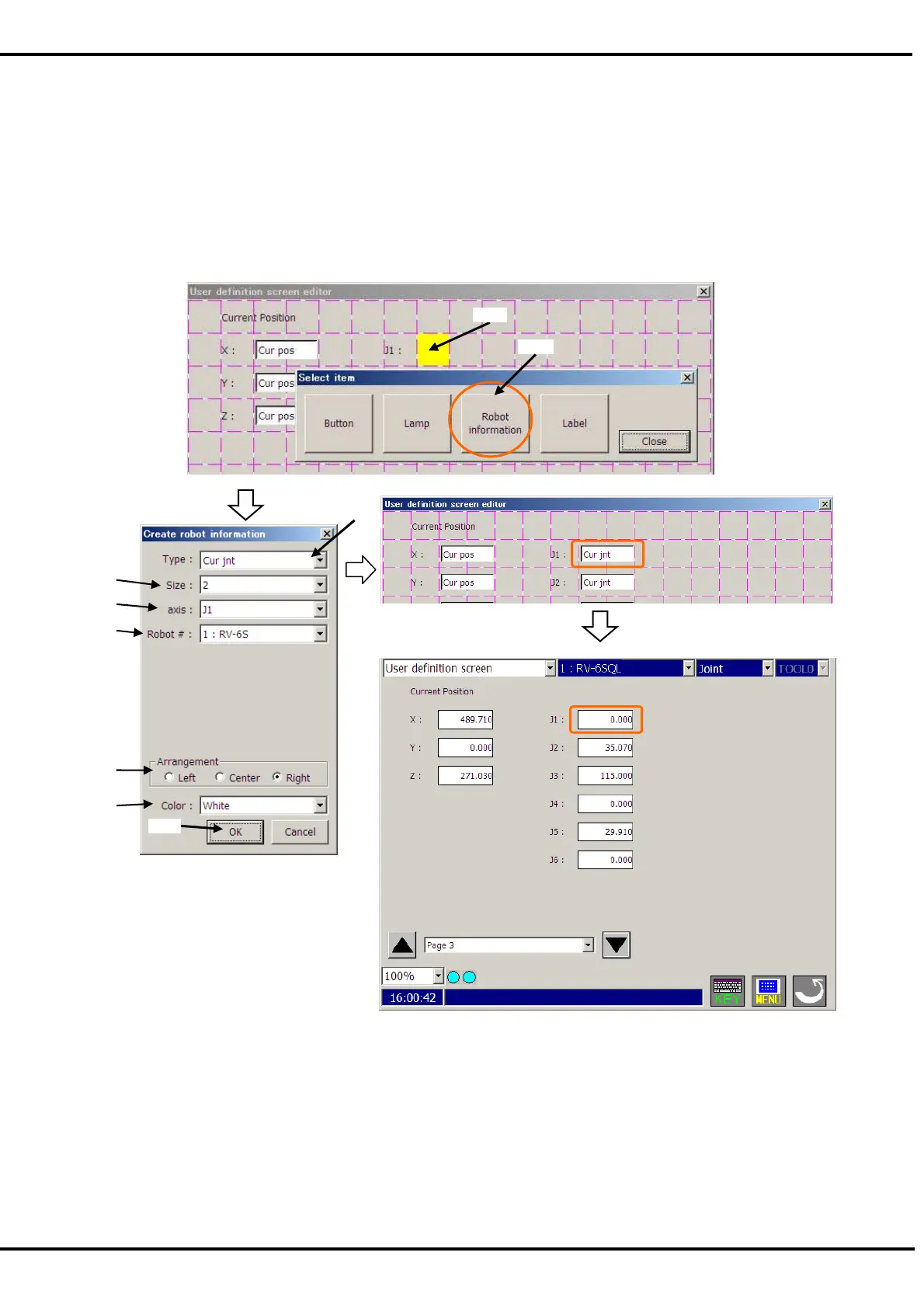
(1) Tap the position (block) in which the current position data is displayed (<a>). Left side of the box is arranged in
this position.
(2) After "Select item" window is displayed, tap [Robot information] button (<b>).
(3) Select "Cur jnt" (<c>) as the type on “Create robot information” window.
(4) After setting the information of the current position data (the joint coordinate system), tap [OK] button (<d>).
<1> Size : Set the width of box in which the current position data (the joint coordinate
system) is displayed. The value from 1 to 16 can be set.
<2> axis : Select the displayed axis of the current position data (the joint coordinate
system).
<3> Robot # : Select the robot number which displays the current position data.
<4> Arrangement : Select the position in which the current position data (the joint coordinate
system) is arranged.
<5> Color : Select the background color of the area where the current position data (the
joint coordinate system) is displayed.
<a>
<b>
<c>
<d>
<1>
<2>
<5>
<4>
<3>
When User definition screen is shown

 Loading...
Loading...



