111
15.3.4. Servo monitor
The servo system is monitored.
When the [Reset] button is tapped of each screen, the maximum value and the minimum value of all monitoring
servo information of position, speed, current, load and power are reset by the batch.
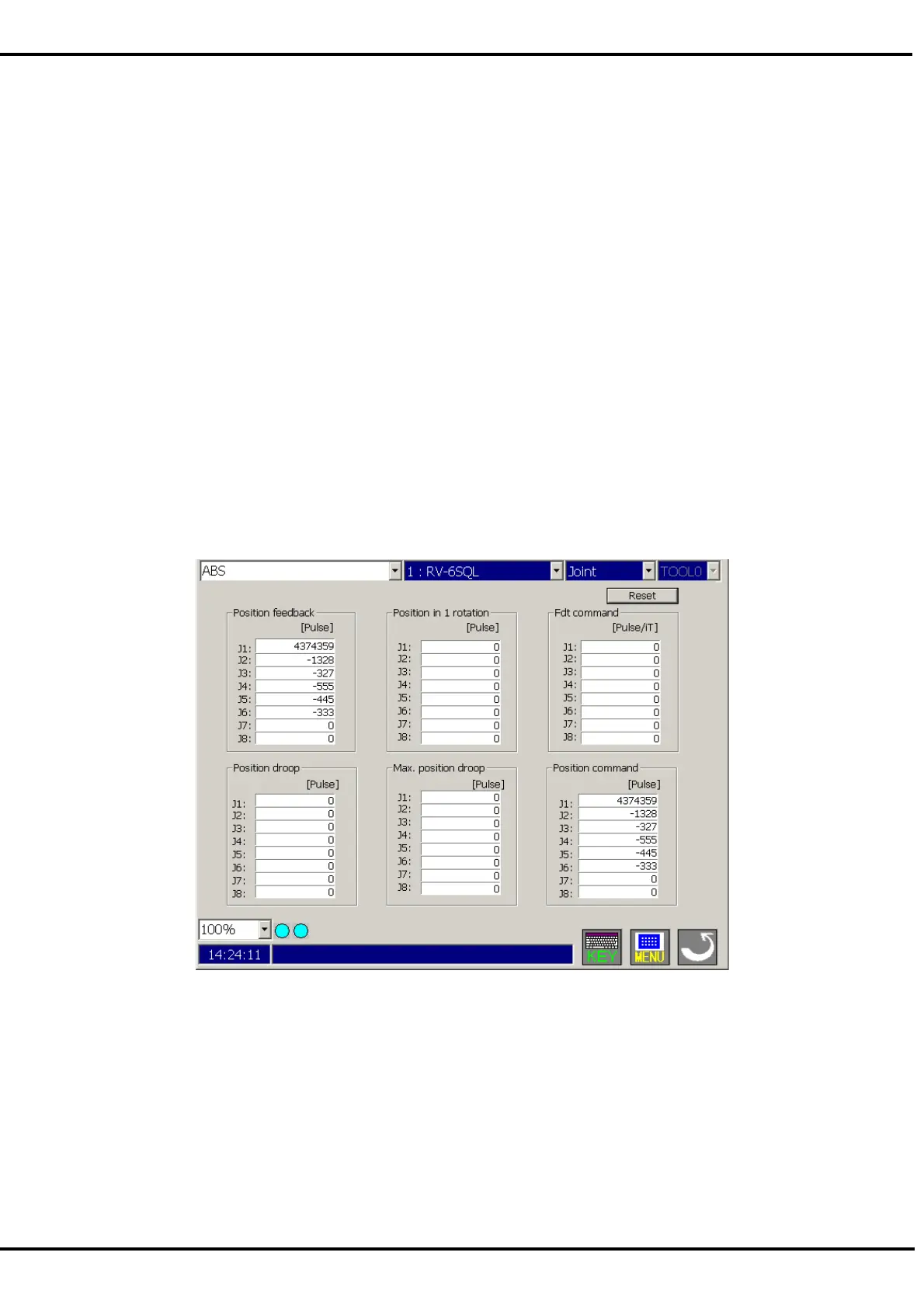
15.3.4.1. Position (ABS)
Data concerning the position of each axis motor can be monitored.
The following data can be monitored.
Position feedback
Current motor rotation position is displayed by the pulse value of the encoder.
Position in 1 rotation
Present position in one rotation of the encoder is displayed.
(It is not displayed in the CR750/700 series controller. It always becomes 0.)
Fdt command
The amount of the change of the position command between the control cycles is shown.
(It is not displayed in the CR750/700 series controller. It always becomes 0.)
Position droop
The amount of deflection at the motor rotation position to a position command is shown.
Max. position droop
The maximum value of position droop after robot controller’s power supply is turned on is displayed.
When the [Reset] button on the screen is tapped, this value is reset in 0.
Position command
The command of the motor rotation position for the servo is displayed by the pulse value.

 Loading...
Loading...



