151
17.4.3.3. Multi-Hand Base
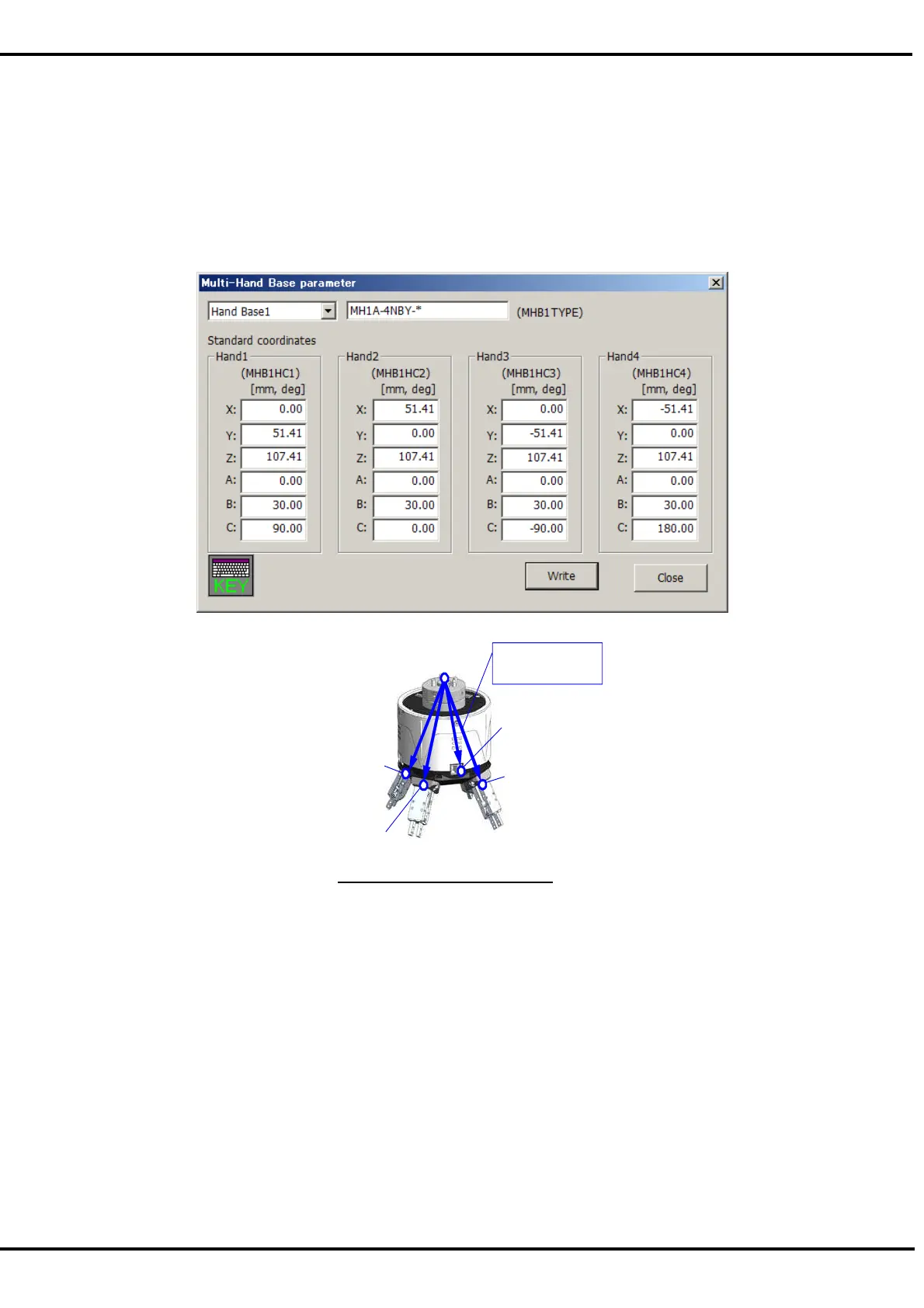
Set the type name of the hand base for the Multi Hand and the Normal coordinates value of each hand.
When the robot and the controller connected to this software correspond to the function of the 'Multi-Hand' , the
item concerning the Multi-Hand are displayed in the parameter menu. Please refer to
”Table 17-1 Robot that
can use the ‘Multi-Hand Tool’ ”, ”Table 17-2 Robot controller that can use the ‘Multi-Hand Tool’ ”
for the
controller and the robot which can set the parameters about the Multi-Hand.
This function is available from this software Ver.2.5 or later.
Mounting center
of Hand 2
Mounting center
of Hand 3
Mounting center
of Hand 4
Mounting center
of Hand 1
The Center of
the mechanical interface
Setting of standard coordinates

 Loading...
Loading...



