11
9.2. Jog mode
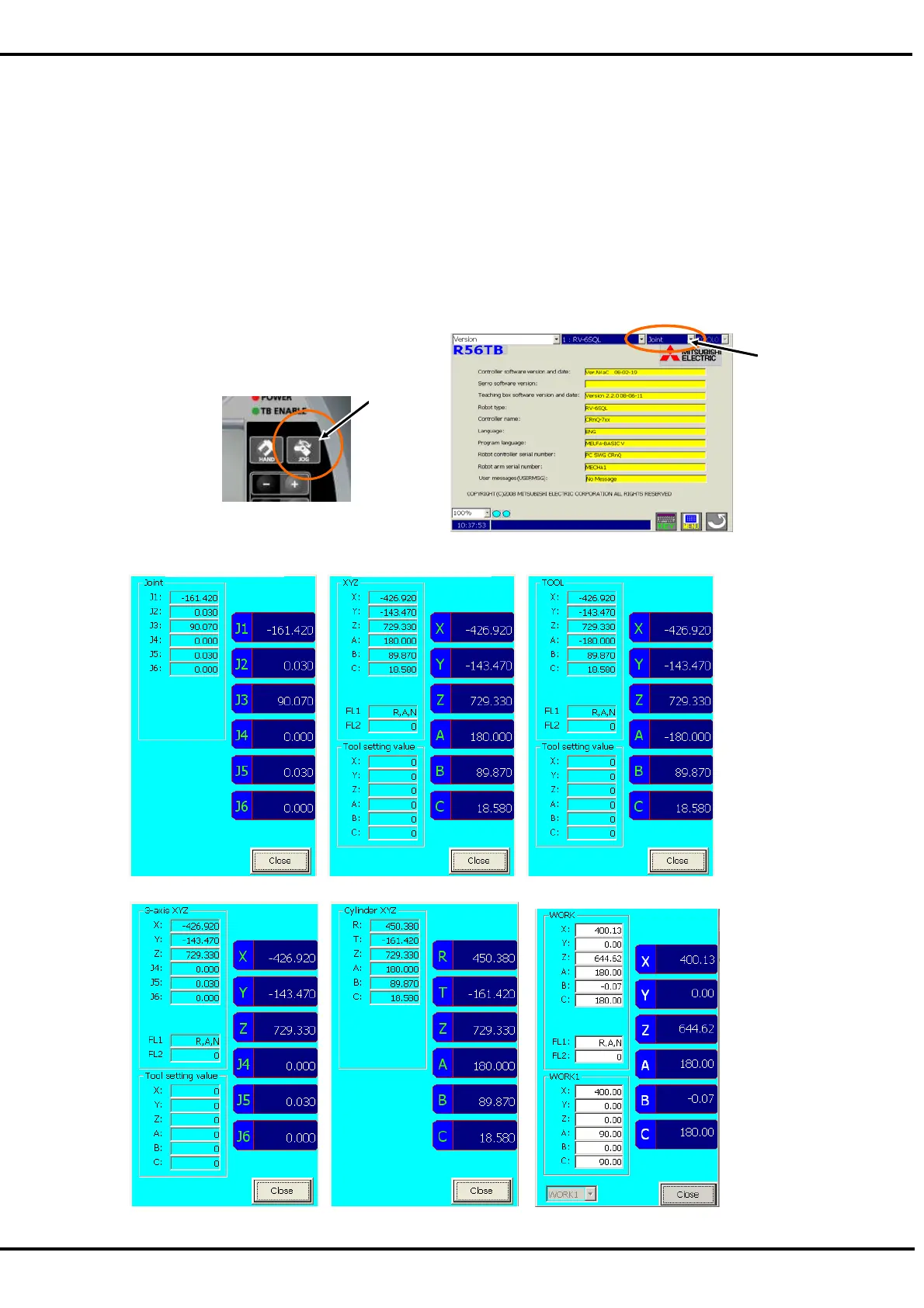
There are JOINT, XYZ, TOOL, 3-axis XYZ, Cylinder and the WORK in jog mode.
Push the [JOG] button (<a>) of T/B, the JOG operation screen will be displayed. The jog mode is changed in order
of JOINT->XYZ->TOOL->3-axis XYZ->Cylinder->WORK, each time the button is pushed. The current jog mode is
displayed in the combo box. (<b>)
Jog mode can be selected from this combo box.
Please refer to separate manual: "ROBOT ARM SETUP & MAINTENANCE," which provides more detailed
explanations.
Note) WORK jog mode is available with Ver.2.3 or later of this software. Moreover the version of connected
controller is limited. Please refer to the “9.10 Work jog operation” or “17.4.26 Work coordinate” for details.
<a>
<b>
Joint jog mode
XYZ jog mode
TOOL jog mode
3-axis jog mode
Cylinder jog mode
WORK jog mode

 Loading...
Loading...



