7 Operation
Maschinenfabrik Reinhausen GmbH 2019138 5163667/06 ENETOS
®
IM
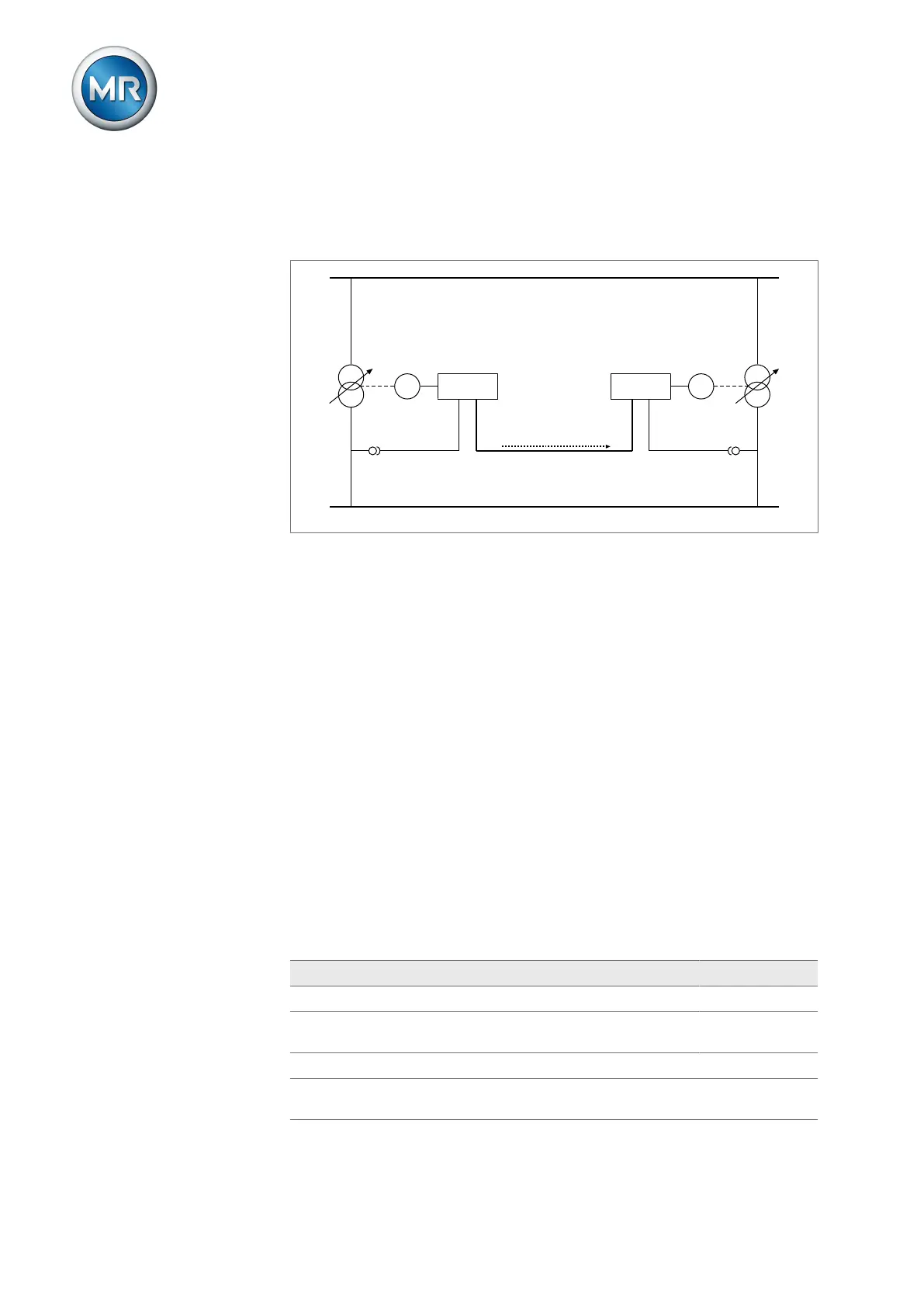
7.7.1.1 Tap synchronization
With the tap synchronization parallel operation method, one voltage regu-
lator works as the master and all others as followers.
Master Follower
Tap position
CAN bus
M AVR MAVR
T1 T2
Figure97: Tap synchronization
The master handles voltage regulation and transmits its current tap positions
to all followers via the CAN bus. The followers compare the tap position re-
ceived with their own tap position. If the tap position is not the same, the fol-
lowers switch to the tap position received from the master. This ensures that
the transformers operating in parallel are always in the same tap position.
You can set whether the master transfers the change in tap position to the
followers before or after its own tap-change operation. The devices then ei-
ther change position sequentially (first the master, then the followers) or in
synch (master and followers at the same time).
If there is a tap difference between the master and followers, the master re-
frains from issuing any control commands to the motor-drive unit until all of
the followers have reached the same tap position. If the tap difference per-
sists for longer than the set delay time for parallel operation error messages,
the master triggers the Step difference to follower event.
You can explicitly designate the voltage regulators as master and followers,
or set automatic designation using the CAN bus address.
For the tap synchronization parallel operation method, you have to set the
following parameters:
Parameter Auto Master Follower
Activate parallel operation Yes
Parallel operation method Auto. tap syn-
chronization
Master Follower
CAN bus address Yes
Circul. reactive current
blocking limit
Optional, if master/follower current blocking is active