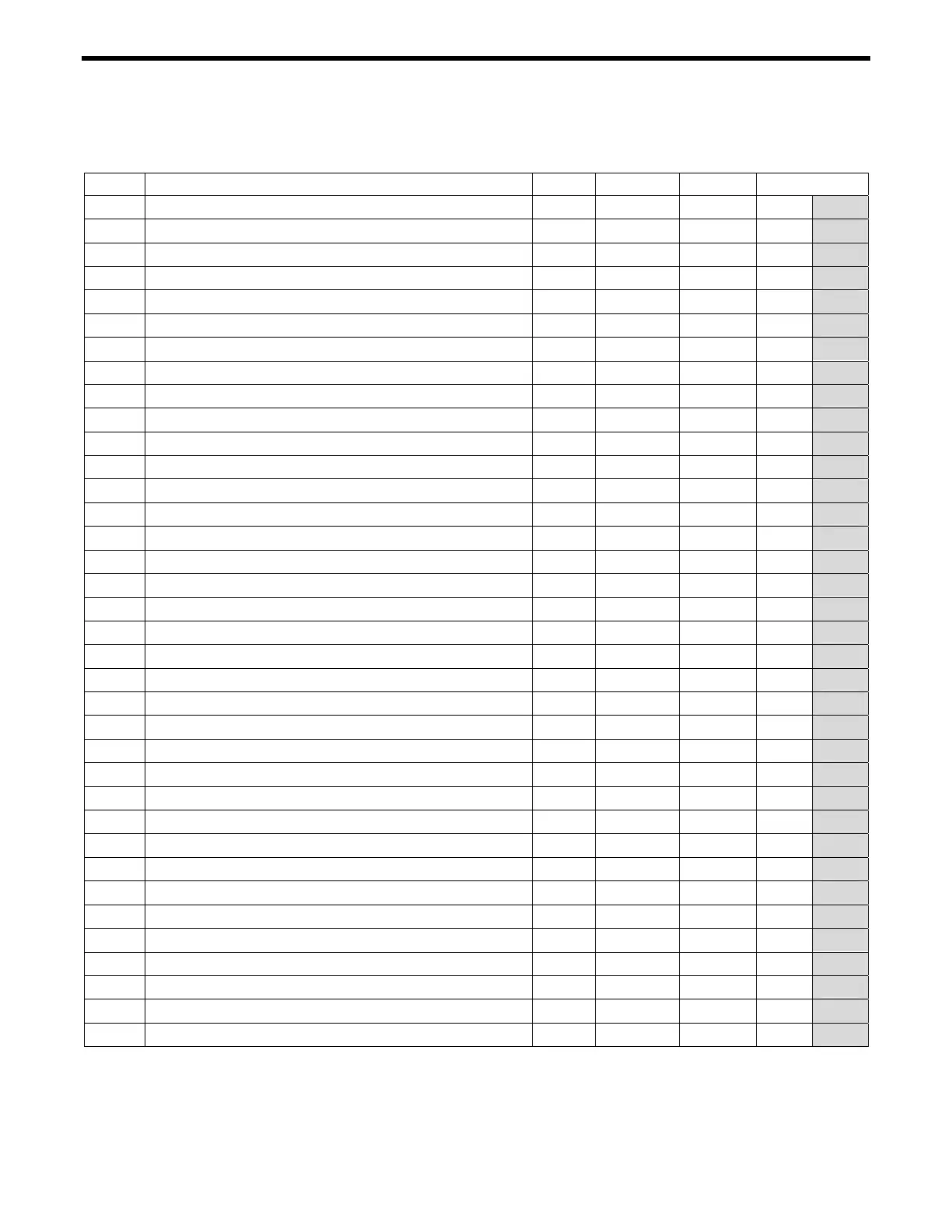
TABLE 3.5.2 – Command List – Alphabetical (Continued)
In a PDF format you may click on a page number to automatically be connected to the corresponding Command Page
Cmd. Description IMM PGM MIP Page
OR
Search for home
♦ ♦
3-
106
PA
Move to absolute position
♦ ♦ ♦
3-
108
PH
Get hardware status
♦
♦
3-
109
PR
Move to relative position
♦ ♦ ♦
3-
112
QD
Update motor driver settings
♦ ♦
3- 113
QG
Set gear constant
♦ ♦
3-
114
QI
Set maximum motor current
♦ ♦
3-
115
QM
Set motor type
♦ ♦
3-
116
QP
Quit program mode
♦
3-
117
QR
Reduce motor torque
♦ ♦ ♦
3-
118
QS
Set microstep factor
♦ ♦
3-
119
QT
Set tachometer gain
♦ ♦
3-
120
QV
Set average motor voltage
♦ ♦
3-
121
RQ
Generate service request
♦ ♦ ♦
3-
122
RS
Reset the controller
♦
♦
3-
123
SA
Set device address
♦ ♦ ♦
3-
125
SB
Set/get DIO port A, B, C bit status
♦ ♦ ♦
3-
126
SH
Set home preset position
♦ ♦ ♦
3-
128
SI
Set master-slave jog velocity update interval
♦ ♦ ♦
3-
129
SK
Set master-slave jog velocity scaling coefficients
♦ ♦ ♦
3-
130
SL
Set level travel limit
♦ ♦ ♦
3-
131
SM
Save settings to non-volatile memory
♦
3-
132
SN
Set axis displacement units
♦ ♦
3-
133
SR
Set right travel limit
♦ ♦
3-
134
SS
Define master-slave relationship
♦ ♦
3-
135
ST
Stop motion
♦ ♦ ♦
3-
136
SU
Set encoder resolution
♦ ♦
3-
137
TB
Read error message
♦
♦
3-
138
TE
Read error code
♦
♦
3-
139
TJ
Set trajectory mode
♦ ♦
3-
140
TP
Read actual position
♦
♦
3- 141
TS
Get controller status
♦
♦
3-
142
TV
Get actual velocity
♦
♦
3- 143
TX
Get controller activity
♦
♦
3-
144
UF
Update servo filter
♦ ♦ ♦
3- 145
UH
Wait for DIO bit high
♦
3-
146
3-16 Section 3 – Remote Mode

 Loading...
Loading...








