6-13
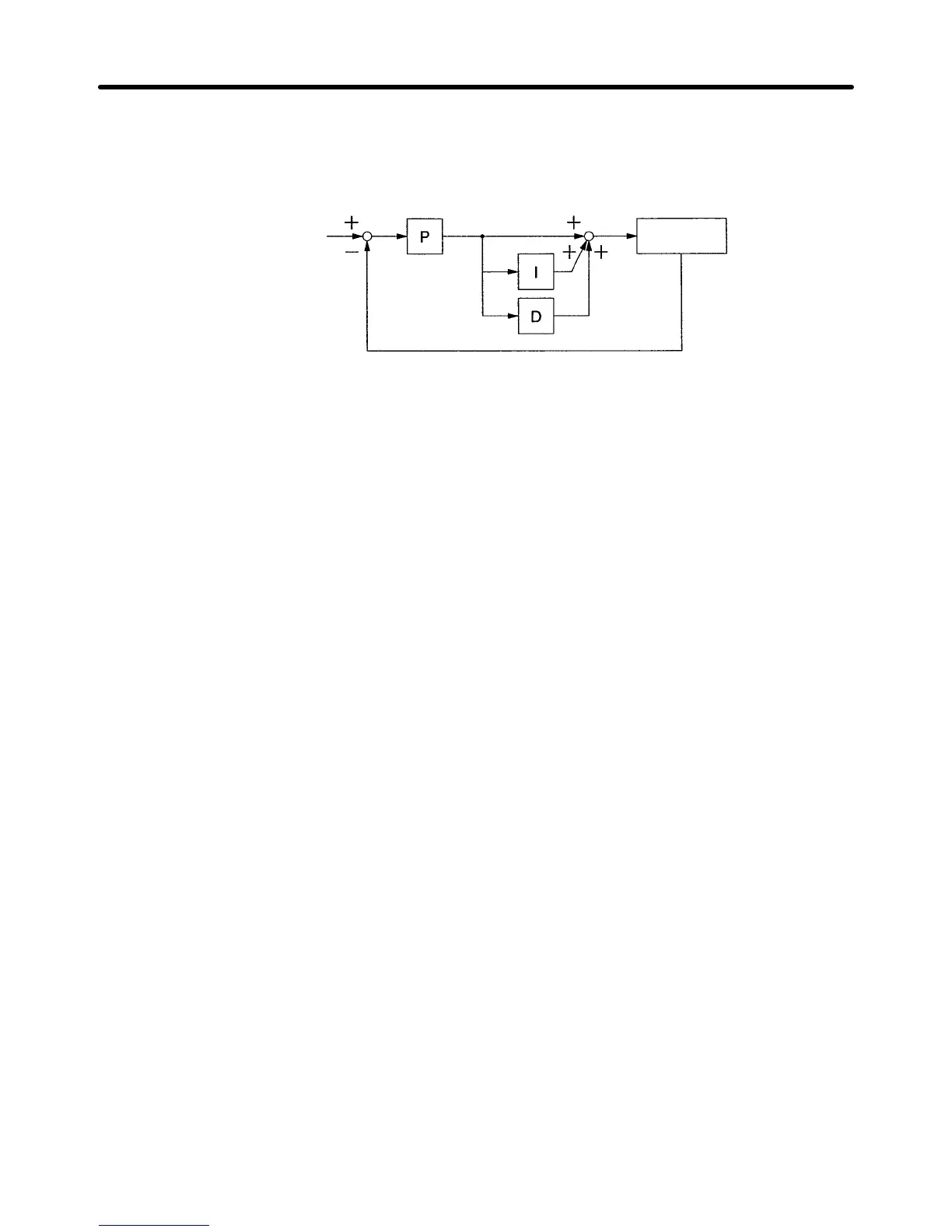
• Basic PID Control
This is the basic control method. The response will be quick if the target value changes because the
deviation derivative value is used. If the target value changes rapidly, however, the control value of the
derivative control block will be large. As a result, overshooting or undershooting may result.
Target value
Target of
control
Detected value (Feedback value)
• Furthermore, 3G3MV Inverter can add the frequency reference to the operation result of the PID con-
trol block.
If the target of control is motor speed, by adding the frequency reference, motor speed control with
high-speed response will be possible.
Do not add the frequency reference if the target of control is temperature or pressure.
Advanced Operation Chapter 6

 Loading...
Loading...






