6-21
6-3-8 PID Fine Tuning
• Refer to the following to tune in PID parameters exactly.
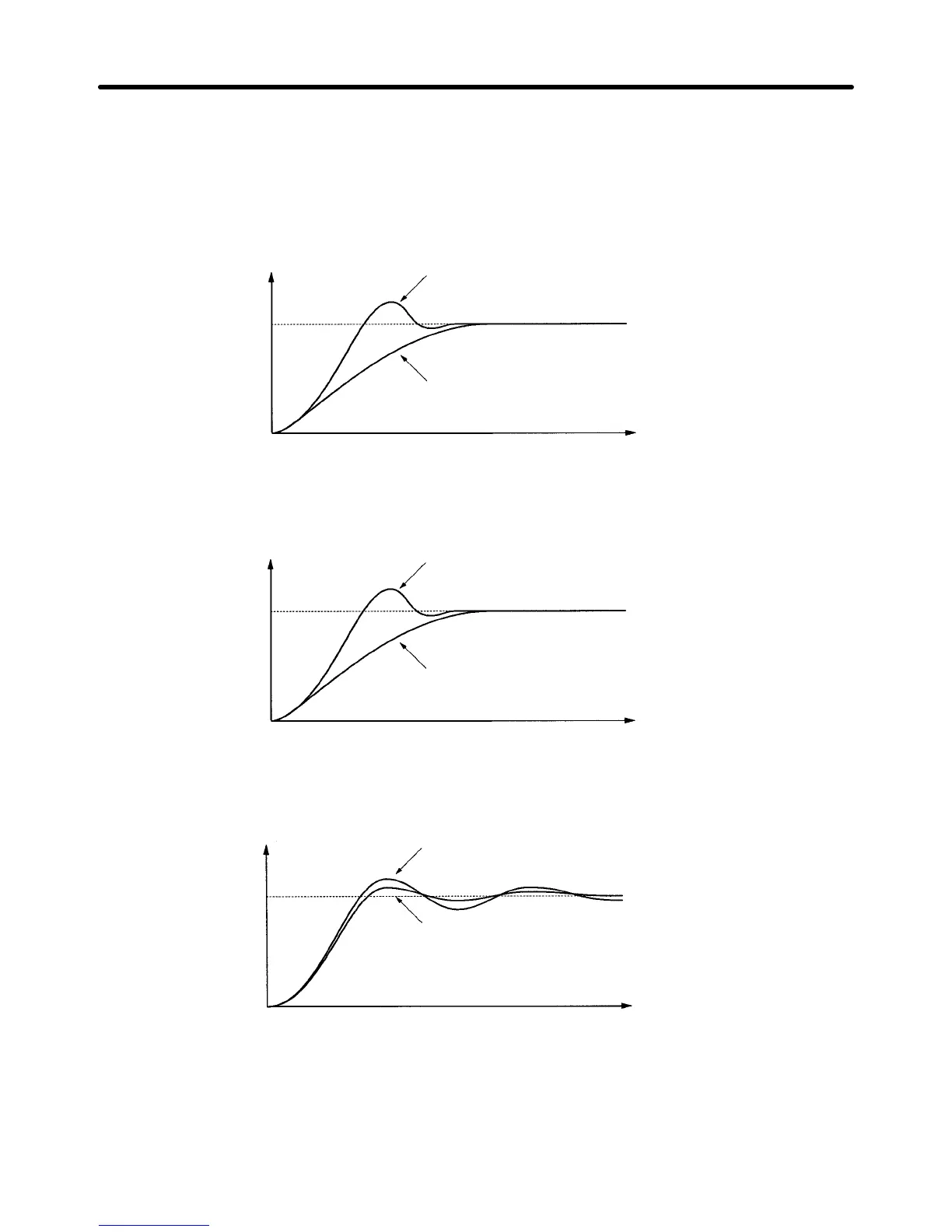
• Suppression of Overshooting
Set the derivative (D) time to a smaller value and the integral (I) time to a larger value if overshooting
results.
Response
Before fine tuning
After fine tuning
Time
• Prompt Stability
Set the integral (I) time to a smaller value and the derivative (D) time to a large value for prompt stability
control, even though overshooting results.
Response
Before fine tuning
After fine tuning
Time
• Suppression of Long-cycle Vibration
Vibration with a wavelength longer than the integral (I) time results from excessive integral control.
The vibration can be suppressed by setting the integral (I) time to a larger value.
Response
Before fine tuning
After fine tuning
Time
Advanced Operation Chapter 6

 Loading...
Loading...






