10-26
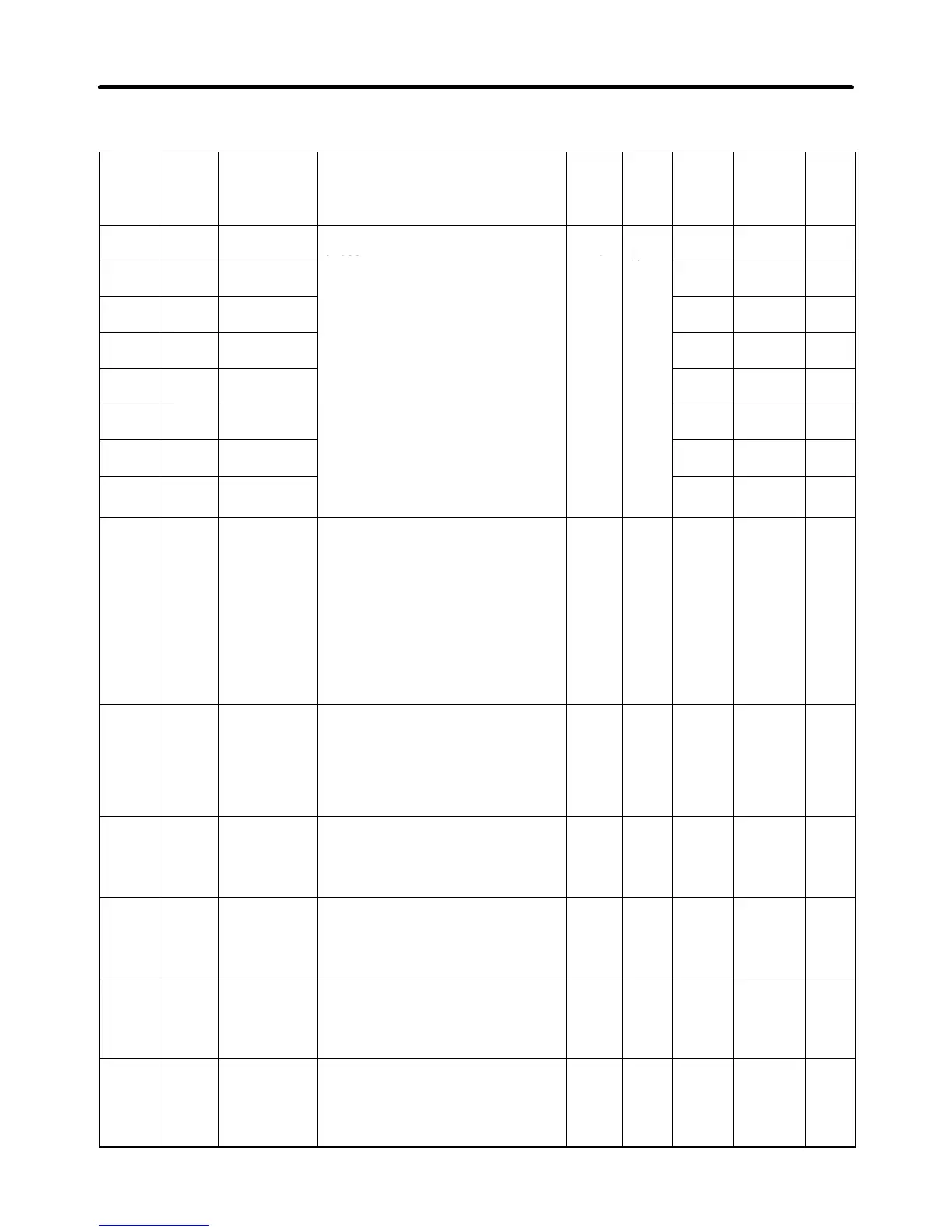
H Function Group 4 (n120 through n179)
Param-
eter
No.
Regis-
ter No.
(Hex)
Name Description Set-
ting
range
Unit
of
set-
ting
Default
setting
Changes
during
opera-
tion
Ref-
er-
ence
page
n120 0178 Frequency
reference 9
Sets the internal frequency refer-
ences.
0.00
Hz to
0.01
Hz
0.00 Yes 5-19
n121 0179 Frequency
reference 10
* These frequency references are
selected with multi-step speed ref-
max. (Cha
nge-
0.00 Yes 5-19
n122 017A Frequency
reference 11
selected with multi step speed ref
erences (multi-function inputs).
See the reference pages for the
relationship bet een m lti step fre
able
with
0.00 Yes 5-19
n123 017B Frequency
reference 12
relationship between multi-step fre-
quency references and frequency
set-
tings)
0.00 Yes 5-19
n124 017C Frequency
reference 13
re
erences.
0.00 Yes 5-19
n125 017D Frequency
reference 14
0.00 Yes 5-19
n126 017E Frequency
reference 15
0.00 Yes 5-19
n127 017F Frequency
reference 16
0.00 Yes 5-19
n128 0180 PID control
selection
Selects the PID control method.
0: PID control disabled.
1 to 8: PID control enabled.
* The derivative control method (i.e.,
the derivative control of the devi-
ation or detected value), the addi-
tion of the frequency reference,
and the positive or negative char-
acteristics of PID control are
selectable.
0 to 8 1 0 No 6-16
n129 0181 Feedback
value adjust-
ment gain
Sets the value by which the feedback
value is multiplied.
* This parameter is used for adjust-
ing the target and detected values
so that they will have the same
input level.
0.00 to
10.00
0.01 1.00 Yes 6-16
n130 0182 Proportional
(P) gain
Sets the proportional (P) gain for PID
control.
* PID control is disabled with this
parameter set to 0.0.
0.0 to
25.0
0.1 1.0 Yes 6-16
n131 0183 Integral (I)
time
Sets the integral (I) time for PID con-
trol.
* Integral control is disabled with this
parameter set to 0.0.
0.0 to
360.0
0.1 s 1.0 Yes 6-16
n132 0184 Derivative (D)
time
Sets the derivative (D) time for PID
control.
* Derivative control is disabled with
this parameter set to 0.0.
0.00 to
2.50
0.01
s
0.00 Yes 6-17
n133 0185 PID offset
adjustment
This parameter is for the offset adjust-
ment of all PID control.
Sets the parameter as a percentage
based on the maximum frequency as
100%.
–100
to 100
1% 0 Yes 6-17
List of Parameters Chapter 10

 Loading...
Loading...






