Setting 7C/7D: Short Circuit Braking (N.O./N.C.) (PM OLV only)
An input programmed for this function can be used to activate Short Circuit Braking in Open Loop Vector Control for PM
motors. By linking all three phases of a PM motor it creates a braking torque in a rotating motor and can be used to stop
a rotating motor or prevent a motor from coasting by external forces (like windmill effect in fan applications etc.).
Description
Digital Inputs
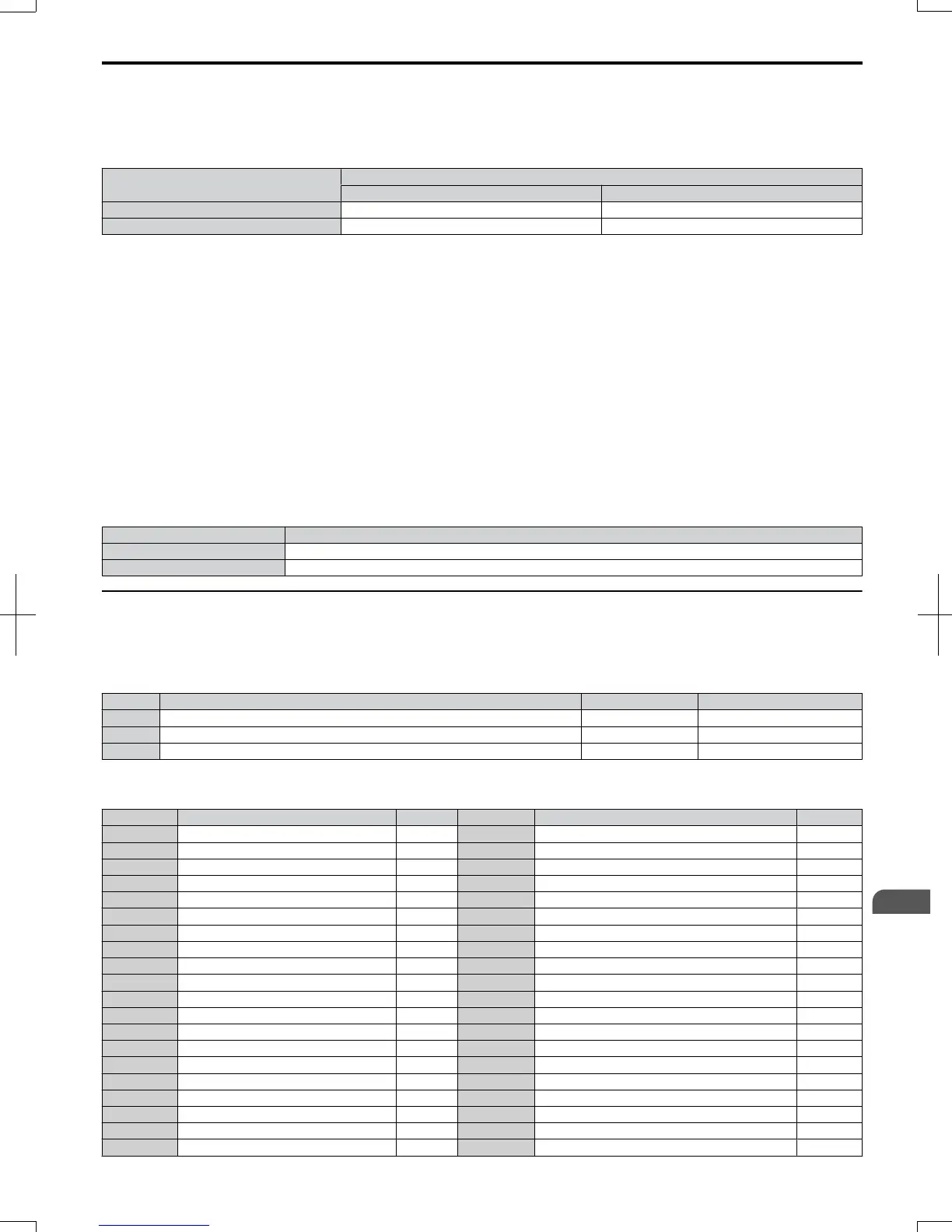
Setting 7C (N.O.) Setting 7D (N.C.)
Normal operation Open Closed
Short-Circuit Braking Closed Open
Setting 7E: Forward Reverse Detection (V/f Control with Simple PG Feedback)
When a digital input is programmed for this function, the input determines the direction of the speed feedback signal for
V/f Control with PG feedback. If the input is open, the speed feedback signal is considered to be forward, if the input is
closed, it is considered to be in reverse. Refer to C5: Automatic Speed Regulator (ASR) on page 129 for details.
Setting 7F: Bi-Directional PID Output Selection
If PID output to bi-directional output conversion is enabled in parameter d4-11, a digital input programmed for 7F can be
used to switch between normal output or bi-directional output.
If the digital input is open, the PID output builds the output frequency reference. If the input is closed, the PID output is
converted to bi-directional output frequency reference. Refer to d4-11: Bi-Directional Output Selection on page 142.
Setting 90 to 96: FBDs Digital Input 1 to 6
These settings are for digital inputs functions used by FBDs. Normally there is no need to change or apply these settings.
Setting 9F: FBDs Function Disable
This function is used to enable or disable a FBDs program in the drive. An input programmed for this function is effective
only if A1-07 = 2.
Status Description
Open FBDs enabled
Closed FBDs disabled
u
H2: Multi-Function Output
n
H2-01 to H2-03: Terminal MA/MB/MC, P1/PC and P2/PC Function Selection
The drive has three multi-function output terminals. Set parameters H2-01 to H2-03 between 0 and 192 to assign functions
to these terminals. Default values are listed in the following table.
No. Parameter Name Setting Range Default
H2-01 Terminal MA, MB and MC Function Selection (relay) 0 to 192 E: Fault
H2-02 Terminal P1 Function Selection (open-collector) 0 to 192 0: During Run
H2-03 Terminal P2 Function Selection (open-collector) 0 to 192 2: Speed Agree 1
Note: If not using an input terminal or if using it in the through-mode, be sure to set that terminal to “F”.
Table 5.27 Multi-Function Output Terminal Settings
Setting Function Page Setting Function Page
0 During Run 170 19 Torque Detection 2 (N.C.) 173
1 Zero Speed 170 1A During Reverse Operation 175
2 Speed Agree 1 170 1B During Baseblock (N.C.) 176
3 User Set Speed Agree 1 171 1C Motor 2 Selection 176
4 Frequency Detection 1 171 1E Restart Enabled 176
5 Frequency Detection 2 172 1F Motor Overload Alarm (oL1) 176
6 Drive Ready 172 20 Drive Overheat Pre alarm (oH) 176
7 DC Bus Undervoltage 172 22 Mechanical Weakening 176
8 During Baseblock (N.O.) 172 30 During Torque Limit 176
9 Frequency Reference Source 173 37 During Frequency Output 176
A Run Command Source 173 38 Drive Enable 176
B Torque Detection 1 (N.O.) 173 39 Watt Hour Pulse Output 176
C Frequency Reference Loss 173 3C LOCAL/REMOTE Status 177
D Braking Resistor Fault 173 3D During Speed Search 177
E Fault 173 3E PID Feedback Low 177
F Not used/Through Mode 173 3F PID Feedback High 177
10 Alarm 173 4A During KEB Operation 177
11 Reset Command Active 173 4B During Short-Circuit Braking 177
12 Timer Output 173 4C During Fast-stop 177
13 Speed Agree 2 173 4D oH Pre-Alarm Time Limit 177
5.7 H: Terminal Functions
SIEP C710606 20 OYMC AC Drive - V1000 User Manual
169
5
Parameter Details
7/16/2008-13:23