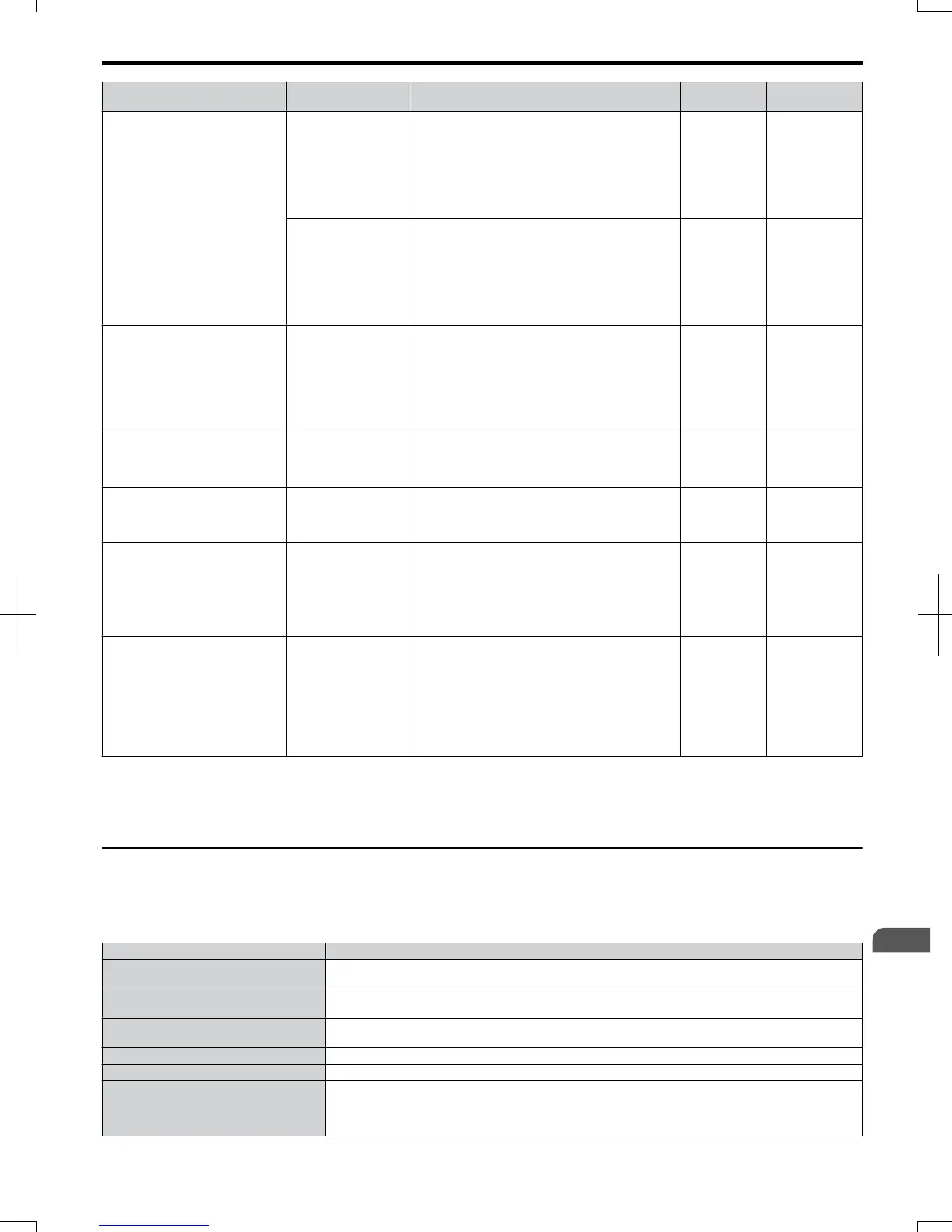
Problem Parameter No. Corrective Action Default Value
Suggested
Setting
• Overvoltage trips when
accelerating, decelerating, or
during sudden speed or load
changes.
AFR Time Constant 2
(n2-03)
• If overvoltage trips occur, gradually increase this
setting by 50 ms.
• If response is slow, gradually reduce this setting
by 10 ms.
Note: Ensure that n2-02 ≤ n2-03. When making
adjustments to n2-03, increase the value of C4-06
(Torque Compensation Primary Delay Time 2)
proportionally.
750 ms 750 to 2000 ms
Torque Compensation
Primary Delay Time
Constant 2 (C4-06)
• If overvoltage trips occur, gradually increase this
setting by 10 ms and check the performance.
• If response is slow, gradually reduce this setting
by 2 ms and check the performance.
Note: Ensure that C4-02 ≤ C4-06. When changing
C4-06 (Torque Compensation Primary Delay Time
Constant 2), increase the value of n2-03
proportionally.
150 ms 150 to 750 ms
• Poor motor torque and speed
response
• Motor hunting and oscillation.
Torque Compensation
Primary Delay Time
Constant 1
(C4-02)
• To improve motor torque speed response,
gradually reduce this setting by 2 ms and check
the performance.
• If motor hunting and oscillation occur, gradually
increase this setting by 10 ms.
Note: Ensure that C4-02 ≤ C4-06. When making
adjustments to C4-02, increase n2-02 (AFR Time
Constant) proportionally.
20 ms
<1>
20 to 100 ms
• Poor speed response and stability
Slip Compensation
Primary Delay Time
Constant (C3-02)
• If response is slow, gradually decrease the setting
by 10 ms.
• If speed is unstable, gradually increase the setting
by 10 ms.
200 ms
<1>
100 to 500 ms
• Poor speed precision
Slip Compensation
Gain (C3-01)
• If speed is too slow, gradually increase the setting
by 0.1 ms.
• If speed is too fast, gradually decrease the setting
by 0.1 ms.
1.0
<1>
0.5 to 1.5
• Motor noise
• Control motor hunting and
oscillation occur at speeds below
10 Hz.
Carrier Frequency
Selection (C6-02)
• If there is too much motor noise, the carrier
frequency is too high.
• If motor hunting and oscillation occur at low
speeds, reduce the carrier frequency.
• The default setting for the carrier frequency
depends on the drive capacity (o2-04) and Drive
Duty Selection (C6-01).
Dep. on drive
capacity
0 to the default
setting
• Poor motor torque at low speeds
• Poor speed response
• Motor instability at motor start.
Mid Output Voltage A
(E1-08)
Minimum Output
Voltage (E1-10)
• If motor torque and speed response are too slow,
increase the setting.
• If the motor exhibits excessive instability at start-
up, reduce the setting.
Note: The default value is for 200 V class units.
Double this value when using a 400 V class drive.
When working with a relatively light load,
increasing this value too much can create an
excessively high of a torque reference.
E1-08: 12.0 V
<1>
E1-10: 2.5 V
<1>
Initial ±2 V
<1> Default settings change when the Control Method is changed (A1-02) or a different V/f pattern is selected using parameter E1-03. The default
setting shown is for V/f Control.
When using OLV Motor Control, leave the torque compensation gain (C4-01) at its default setting of 1.00. To increase
speed precision during regeneration in OLV Motor Control, enable slip compensation during regeneration (C3-04 = “1”).
u
Motor Hunting and Oscillation Control Parameters
In addition to the parameters discussed on page 144, the following parameters indirectly affect motor hunting and
oscillation.
Table 6.3 Parameters that Affect Control Performance in Applications
Name (Parameter No.) Application
Dwell Function (b6-01 through b6-04)
Prevents motor speed loss by maintaining the output frequency when working with heavy loads or when
there is powerful backlash on the machine side.
Accel/Decel Time (C1-01 through
C1-09)
Adjusting accel and decel times will affect the torque presented to the motor during acceleration or
deceleration.
S-Curve Characteristics (C2-01 through
C2-04)
Prevents shock at the beginning and end of acceleration and deceleration.
Jump Frequency (d3-01 through d3-04) Skips over the resonant frequencies of connected machinery.
Analog Filter Time Constant (H3-13) Prevents fluctuation in the analog input signal due to noise.
Stall Prevention (L3-01 through L3-06,
L3-11)
• Prevents motor speed loss and overvoltage. Used when the load is too heavy and also during sudden
acceleration/deceleration.
• Adjustment is not normally required because Stall Prevention is enabled as a default. Disable Stall
Prevention during deceleration (L3-04 = “0”) when using a braking resistor.
6.2 Motor Performance Fine Tuning
SIEP C710606 20 OYMC AC Drive - V1000 User Manual
225
6
Troubleshooting
7/16/2008-13:23