Function Description
Operating Manual PMCprotego D.48, PMCprotego D.72
1001735-EN-04
68
4.3.8.2 CANopen interface
The servo amplifier has a CANopen interface for connection to a bus system:
The interface uses the following profiles:
} CANopen communication profile, specification CiA DS-301
} Device profile for drives DS-402
The following functions are available for position controllers, for example:
} Jogging with variable speed
} Reference runs
} Start motion task
} Start direct motion task
} Specify digital setpoint
} Data transfer functions
For further information please refer to the CANopen manual.
When the appropriate parameters are set, the analogue setpoint inputs can still be used.
4.3.8.3 Ethernet-based interface
The servo amplifier operates as an Ethernet subscriber. The connection to Ethernet is
made via the two 8-pin RJ45 sockets.
Communication is via:
} EtherCAT
See Type code
The interface is deactivated if a fieldbus expansion card is inserted.
The protocol installed with the firmware must be enabled (ASCII command ETHMODE).
Default setting:
CANopen is activated if a CANopen connection is detected when booting the servo ampli-
fier. Otherwise, EtherCAT is activated.
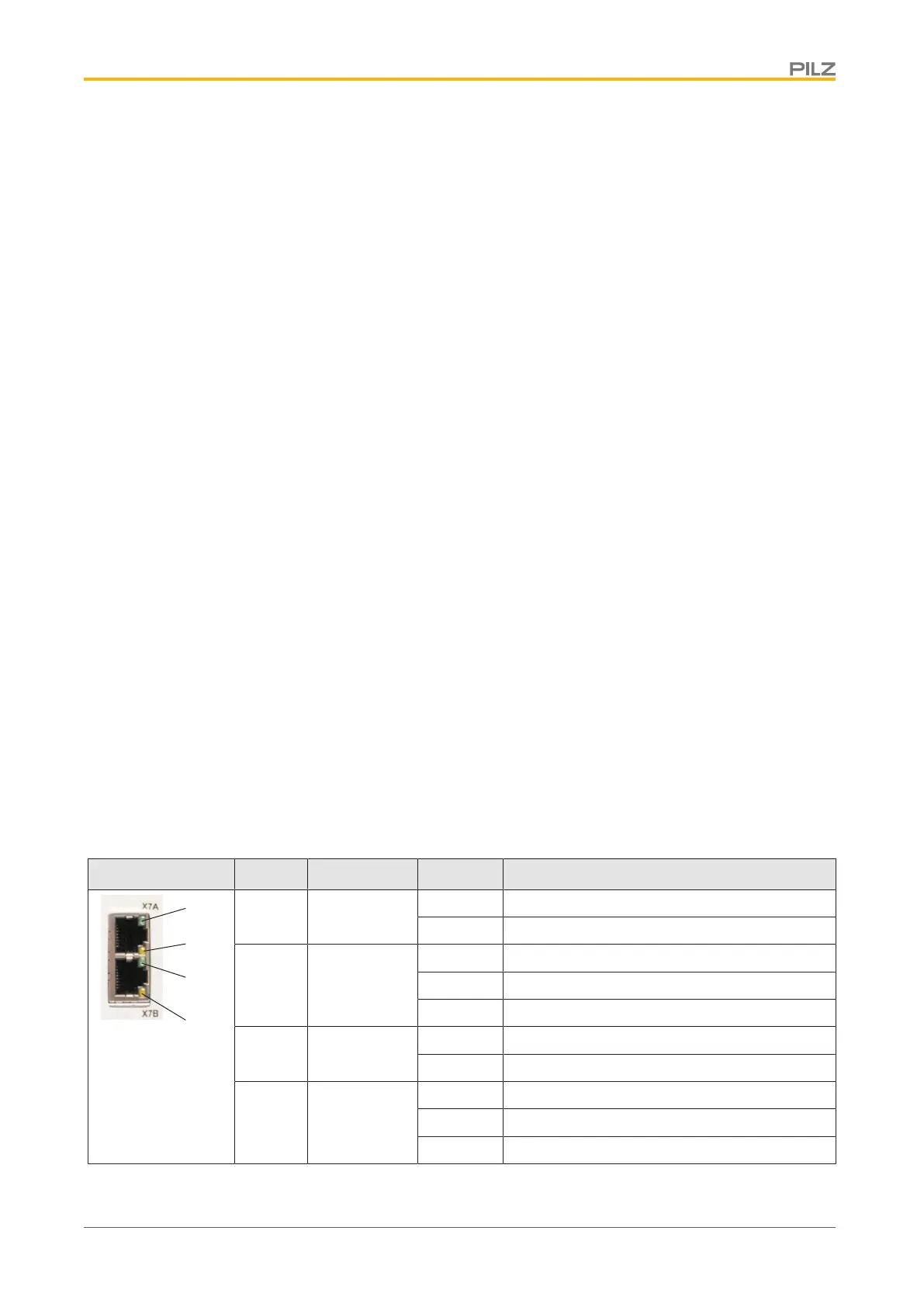
Various operating and fault statuses are displayed via the LEDs on the two RJ45 interfaces.
RJ45 LED Name Signal Meaning
LED1 LINK_IN On Receipt is valid (IN port)
Off Invalid, power off or reset
LED2 CYCLIC On Network cyclical
Flashes Network not cyclical
Off Power off or reset
LED3 LINK_OUT On Receipt is valid (OUT port)
Off Invalid, power off or reset
LED4 REPEATER On Repeater on, network cyclical
Flashes Repeater on, network not cyclical
Off Repeater off, power off or reset
Recommended cable: Cat 5e
 Loading...
Loading...