Function Description
Operating Manual PMCprotego D.48, PMCprotego D.72
1001735-EN-04
59
SinCos encoder without data track (X1)
Functions:
} SinCos encoder without data track connected as a primary or secondary feedback sys-
tem.
} Each time the 24 V supply voltage is switched on, the servo amplifier needs the start-up
information for the position controller (motor phase parameter MPHASE). Depending on
the encoder type, either a wake & shake is executed or the value for the MPHASE
parameter is taken from the servo amplifier's EEPROM.
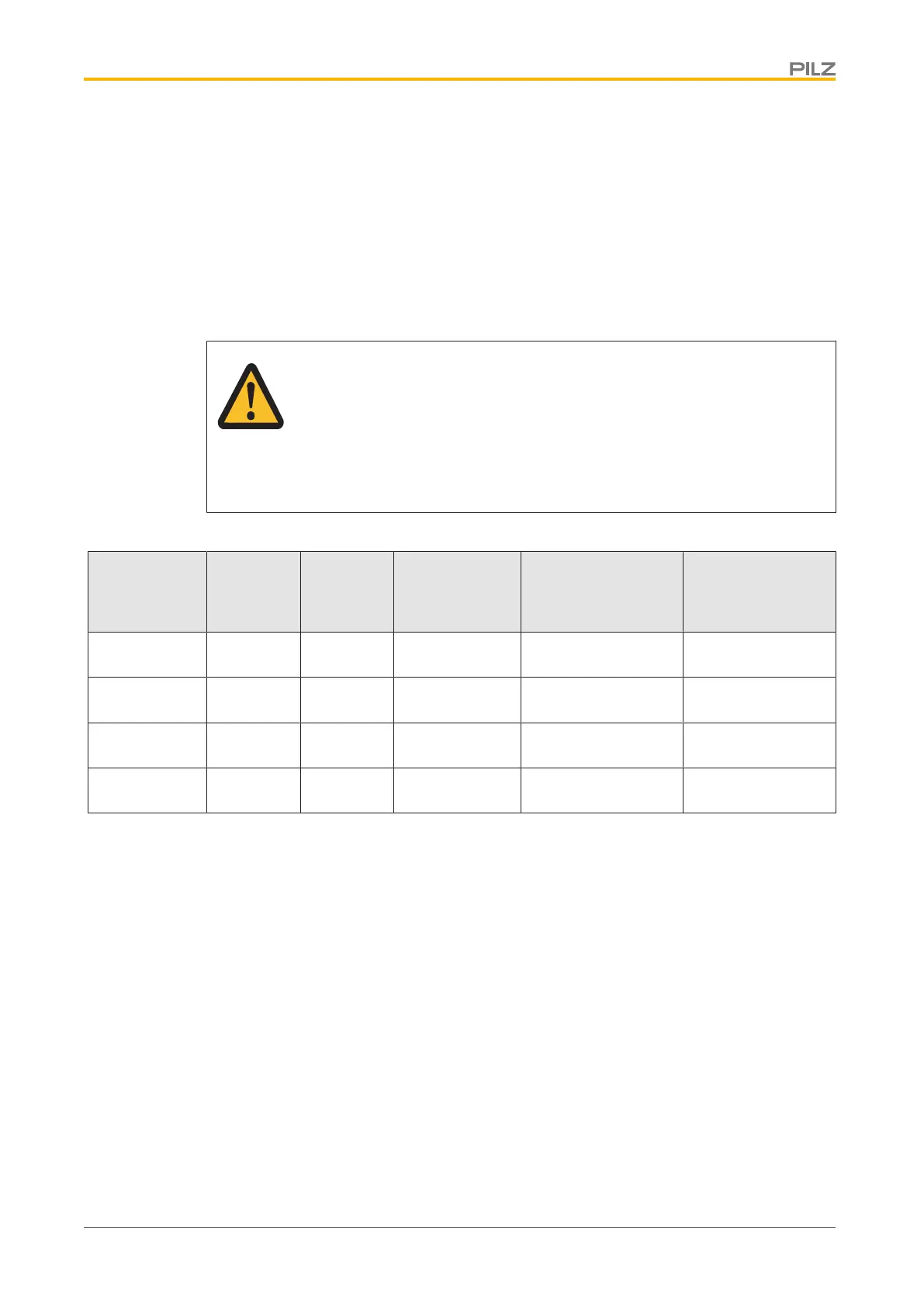
DANGER!
Suspended loads! Moving parts present a threat to life.
On vertical axes, the load could fall unbraked. The brake is released with
wake & shake and the torque is insufficient to hold the load.
Do not use this feedback system with vertical, suspended loads.
Setting the parameters:
Encoder type
Paramet-
ers
FBTYPE
Paramet-
ers
EXTPOS
Parameters
GEARMODE
Supply
voltage Up Note
SinCos en-
coder 5V
1 6 6 5V +/-5% MPHASE from EEP-
ROM
SinCos en-
coder 12 V
3 7 7 7.5 – 11V MPHASE from EEP-
ROM
SinCos en-
coder 5V
7 6 6 5V +/-5% MPHASE with wake
& shake
SinCos en-
coder 12 V
8 7 7 7.5 – 11V MPHASE with wake
& shake
4.3.5.4 Incremental encoders
Incremental encoder ROD (AquadB) 5V, 350 kHz, 1.5 MHz (X1)
Functions:
} Incremental encoder ROD (AquadB) with 5V signal connected as a primary or second-
ary feedback system.
} Types for cutoff frequency 350 kHz or 1.5 MHz
} Each time the 24 V supply voltage is switched on, the servo amplifier needs the start-up
information for the position controller (motor phase parameter MPHASE). Depending on
the encoder type, either a wake & shake is executed or the value for the MPHASE
parameter is taken from the servo amplifier's EEPROM.
 Loading...
Loading...