Function Description
Operating Manual PMCprotego D.48, PMCprotego D.72
1001735-EN-04
51
9
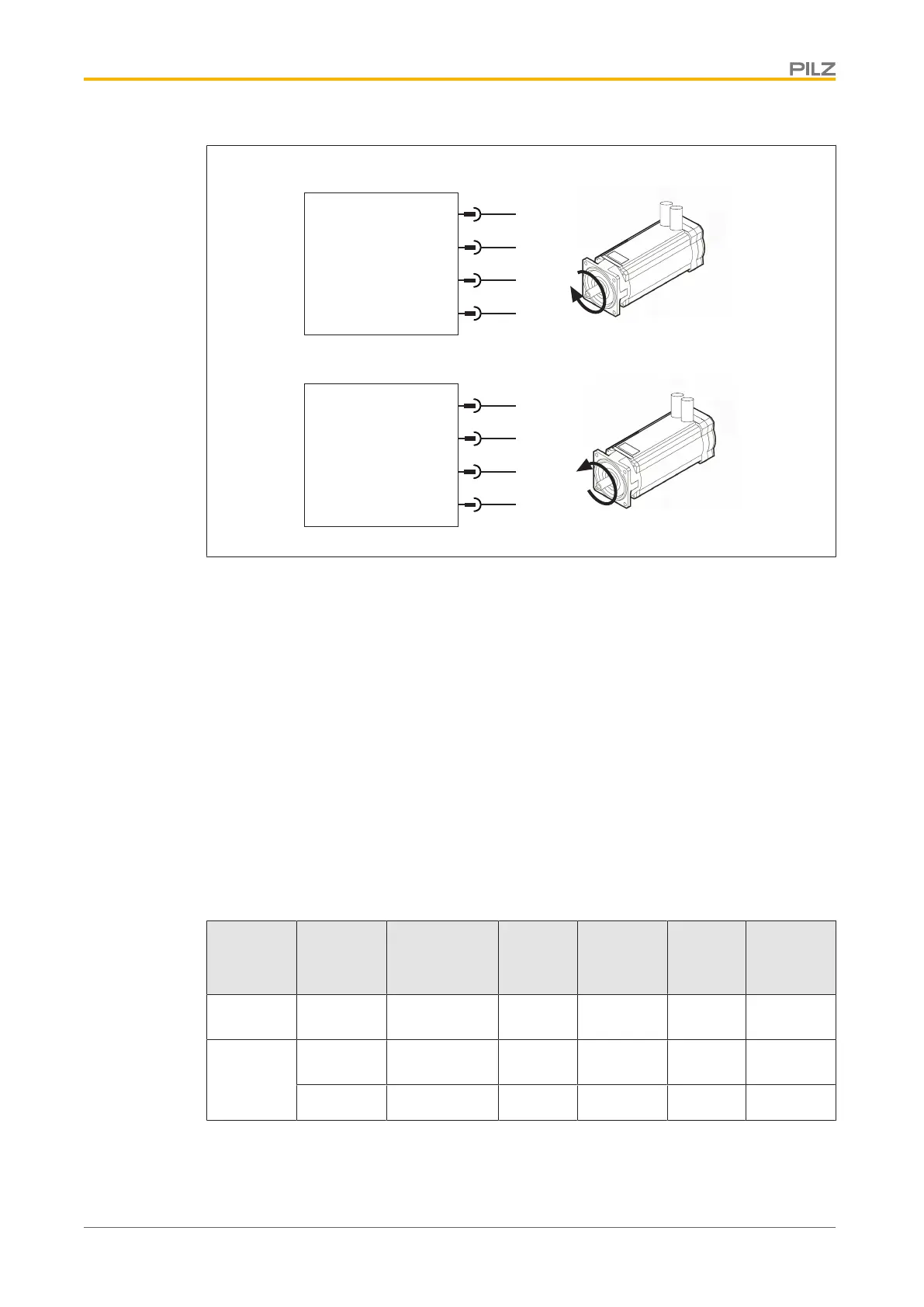
ANALOG-IN1-
ANALOG-IN1+
10
11
12
ANALOG-IN2-
ANALOG-IN2+
PMCprotego
X3B
- U
+ U
- U
+ U
9
10
11
12
PMCprotego
X3B
+ U
- U
+ U
- U
ANALOG-IN1-
ANALOG-IN1+
ANALOG-IN2-
ANALOG-IN2+
Fig.: Direction of rotation
4.3.5 Encoder systems
4.3.5.1 Overview
Each closed drive system normally requires at least one encoder, which transmits actual
values (e.g. speed, position) from the motor to the servo amplifier. Feedback to the servo
amplifier can be transmitted in digital or analogue, depending on the encoder type.
Up to three encoders can be used in parallel.
Setting the parameters:
The functions are assigned the following parameters in the commissioning software:
} FBTYPE ("Feedback" window), primary feedback in the motor
} EXTPOS ("Position Loop" window), secondary feedback, external position
} GEARMODE ("Electronic Gearing" window), secondary feedback, externally driven
Configura-
tion Location Parameter
Commut-
ation
Speed reg-
ulator
Position
control-
ler
Electronic
Gearing
One en-
coder
In the mo-
tor
FBTYPE x x x
Two en-
coders (ex-
ternal posi-
tion)
In the mo-
tor
FBTYPE x x
External EXTPOS x
 Loading...
Loading...