Instructions
11.2 S7-1500 Motion Control V1
S7-1500 Motion Control V13 Update 3
310 Function Manual, 07/2014, A5E03879256-AC
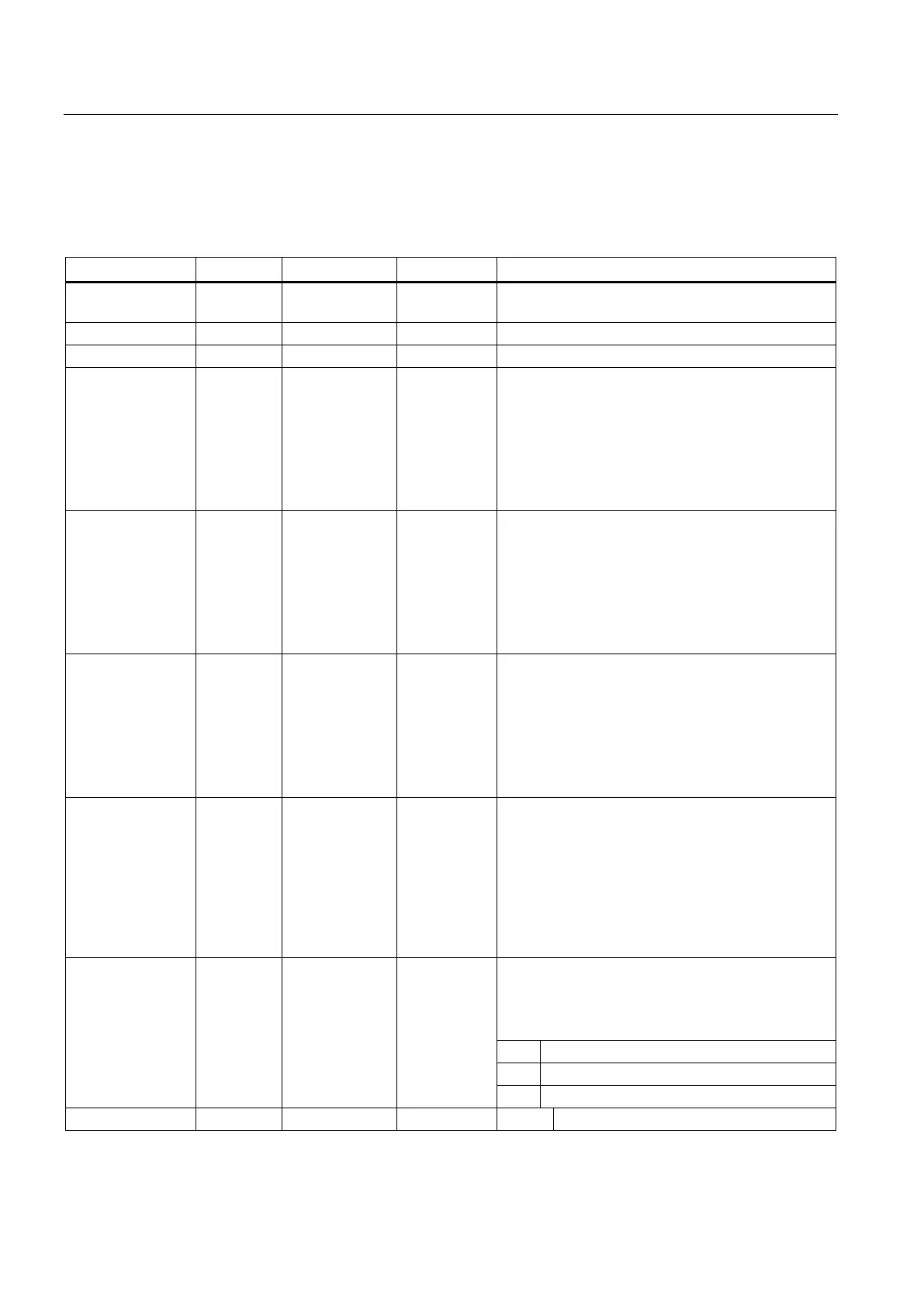
The following table shows the parameters of the "MC_MoveAbsolute" Motion Control
instruction:
Axis InOut TO_Positioning
- Technology object
Start of the job with a positive edge
Velocity INPUT LREAL -1.0 Setpoint velocity for the positioning
Value > 0.0: The specified value is used.
Value = 0.0: not permitted
Value < 0.0: The velocity configured in "Technology
object > Configuration > Advanced parameters >
Default dynamics" is used.
(<TO>.DynamicDefaults.Velocity)
Acceleration INPUT LREAL -1.0 Acceleration
Value > 0.0: The specified value is used.
Value = 0.0: not permitted
Value < 0.0: The acceleration configured in "Tech-
nology object > Configuration > Extended parame-
ters > Dynamic defaults" is used.
(<TO>.DynamicDefaults.Acceleration)
Deceleration INPUT LREAL -1.0 Deceleration
Value > 0.0: The specified value is used.
Value = 0.0: not permitted
Value < 0.0: The deceleration configured in "Tech-
nology object > Configuration > Extended parame-
ters > Dynamic defaults" is used.
(<TO>.DynamicDefaults.Deceleration)
Jerk INPUT LREAL -1.0 Jerk
Value > 0.0: Constant-acceleration velocity profile;
the specified jerk is used
Value = 0.0: Trapezoid velocity profile
Value < 0.0: The jerk configured in "Technology
object > Configuration > Extended parameters >
Dynamic defaults" is used.
(<TO>.DynamicDefaults.Jerk)
Direction INPUT INT 3 Direction of rotation of the axis
Is only evaluated with "modulo" enabled.
"Technology object > Configuration > Basic parame-
Positive direction of rotation
2 Negative direction of rotation
 Loading...
Loading...






