Motor Capacity kW (HP) Three-Phase 400 V Class
Input Voltage < 460 V Input Voltage ≥ 460 V
Model CIMR-Zo
Rated Output Current (A)
185 (250) 220 (300)
4A0361
361
<3>
220 (300) 260 (350)
4A0414
414
<3>
250 (340) 300 (400)
4A0480
480
<3>
300 (400) 370 (500)
4A0590
590
<3>
<1> Assumes the carrier frequency is set to 5 kHz.
<2> Assumes the carrier frequency is set to 4 kHz.
<3> Assumes the carrier frequency is set to 2 kHz.
Note: Current derating is required when setting the carrier frequency higher.
u
Control Mode Selection
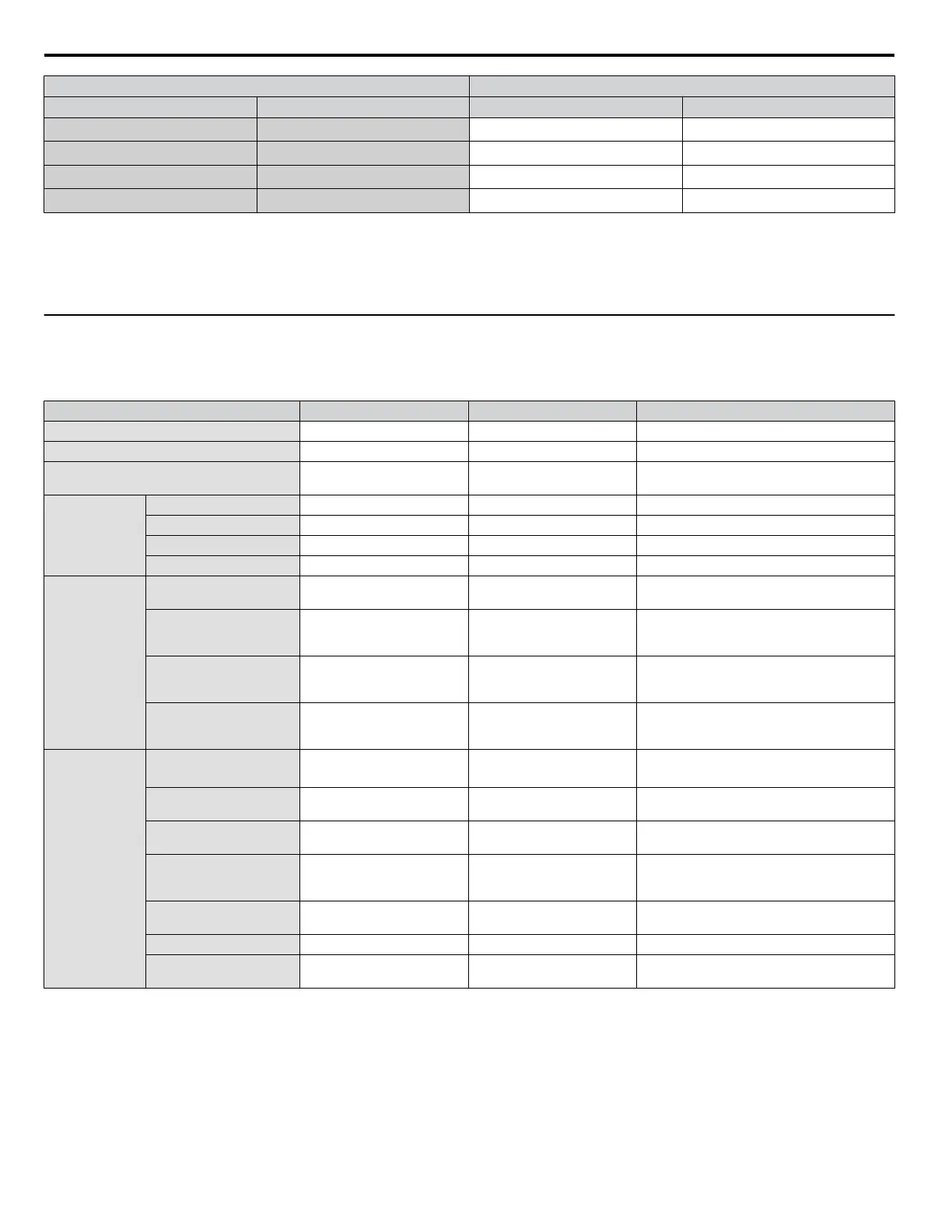
Table 1.2 gives an overview of the control modes and the various features associated with those control modes.
Table 1.2 Control Modes and Features
Motor Type Induction Motors Permanent Magnet Motors Comments
Control Mode V/f OLV/PM –
Parameter Setting A1-02 = 0 A1-02 = 5 Default Setting is V/f control (A1-02 = 0)
Basic Description V/f control
Open Loop Vector control
for PM motors
–
Type of
Applications
Motor Type IM PM –
Multi Motor YES – –
Motor data unknown YES – –
High Speed Accuracy – YES –
Control
Characteristics
Speed Control Range 1:40 1:20
May fluctuate with characteristics and motor
temperature.
Speed Accuracy ±2 to 3% ±0.2%
Speed deviation when operating at constant speed
may fluctuate with characteristics and motor
temperature.
Speed Response 3 Hz (approx.) 10 Hz
Max. frequency of a speed reference signal that the
drive can follow may fluctuate with characteristics
and motor temperature.
Starting Torque 140% at 3 Hz
100% at
5% speed
Starting torque may fluctuate with characteristics and
motor temperature.
Performance may differ by capacity.
Application-
Specific
Auto-Tuning
• Energy Saving Tuning
• Line to line resistance
• Stationary
• Line to line resistance
Automatically adjusts parameter settings that concern
electrical characteristics of the motor.
Speed Search YES YES
Bi-directional speed detection of a coasting motor to
restart it without stopping.
Energy-Saving Control YES –
Saves energy by always operating the motor at its
maximum efficiency.
High Slip Braking YES –
Increases motor loss to allow for faster deceleration.
Effectiveness may vary based on motor
characteristics.
Kinetic Energy Buffering YES YES
Decelerates the drive to allow it to ride through a
momentary power loss and continue operation.
Overexcitation Deceleration YES – Allows faster deceleration without overvoltage trip.
Overvoltage Suppression YES YES
Prevents overvoltage by increasing speed during
regeneration.
1.2 General Description
26
YASKAWA ELECTRIC TOEP C710616 45F YASKAWA AC Drive – Z1000 User Manual

 Loading...
Loading...














