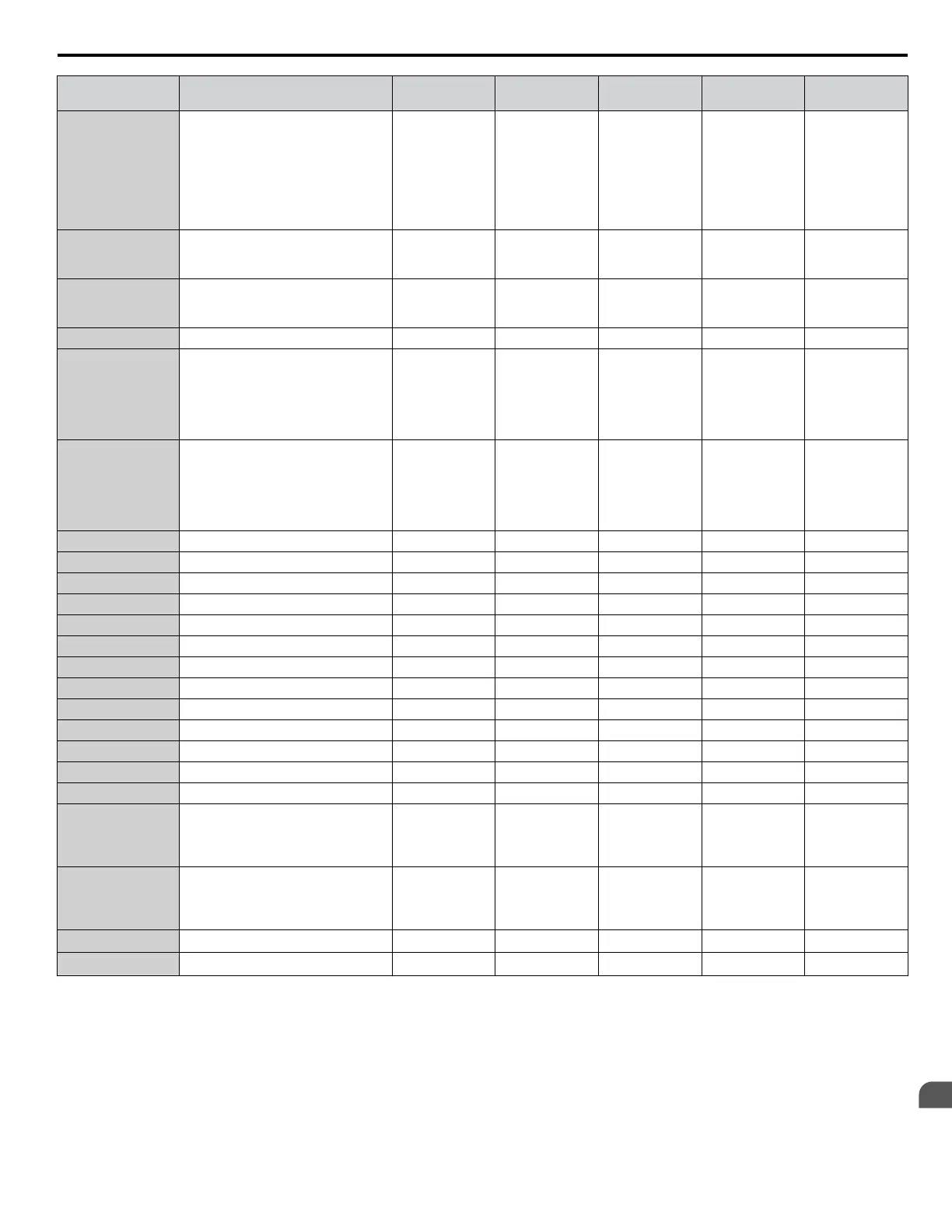
Object ID Object Name
Modbus
Address
Precision Range Units PV Access
AV8
Data Link Status (Bitmapped)
Bit 0: Writing Data
Bit 1: Reserved
Bit 2: Reserved
Bit 3: Upper or lower limit error
Bit 4: Data conformity error
Bit 5: Writing to EEPROM
Bit 6 to F: Reserved
0x0022 – 0 to 63 Bitmapped R
AV9 Frequency Reference 0040H
XXX.XX
Depends on
o1-03
–
Hz
Depends on
o1-03
R
AV10 Output Frequency 0041H
XXX.XX
Depends on
o1-03
–
Hz
Depends on
o1-03
R
AV11 Output Voltage 0045H XXXX.X – Volts R
AV12 Output Current 0026H
XXXX.X
(for drives rated
above 11 kVA)
XXX.XX
(for drives rated
11 kVA or lower)
– Amps R
AV13 Output Power 0047H
XXXX.X
(for drives rated
above 11 kVA)
XXX.XX
(for drives rated
11 kVA or lower)
– kW R
AV14 Torque Reference 0048H XXXX.X – % R
AV15 MF Input Status – – – – –
AV16 Drive Status 2 – – – – –
AV17 MF Output Status – – – – –
AV18 DC Bus Voltage 0031H XXXX.X – Volts R
AV19 PI Feedback Level 0038H XXXX.X – % R
AV20 PI Input Level 0039H XXXX.X – % R
AV21 PI Output Level 003AH XXXX.X – % R
AV22 CPU Software 005BH XXXXX – – R
AV23 Flash Number 004DH XXXXX – – R
AV24 Not used – – – – –
AV25 kVA Setting 0508H XXXXX – – R
AV26 Control Method 0043H XXXXX – – R
AV27 Accel Time 0200H
XXXX.X
(when C1-10 = 1)
XXX.XX
(when C1-10 = 0)
0.0 to 6000.0
(when C1-10 = 1)
0.00 to 600.00
(when C1-10 = 0)
Sec W
AV28 Decel Time 0201H
XXXX.X
(when C1-10 = 1)
XXX.XX
(when C1-10 = 0)
0.0 to 6000.0
(when C1-10 = 1)
0.00 to 600.00
(when C1-10 = 0)
Sec W
AV29
<1>
Param Number – XXXXX 0 to FFFFH – W
AV30
<1>
Param Data – XXXXX 0 to FFFFH – W
<1> Refer to Accessing Drive Parameters and the Enter Command on page 358 for an explanation of how to read and write drive parameters not
listed in the analog or binary objects.
C.7 BACnet Objects Supported
YASKAWA ELECTRIC TOEP C710616 45F YASKAWA AC Drive – Z1000 User Manual
355
C
BACnet
Communications

 Loading...
Loading...














