U511 User’s Manual Tuning Servo Loops
Version 1.1 Aerotech, Inc. 8-37
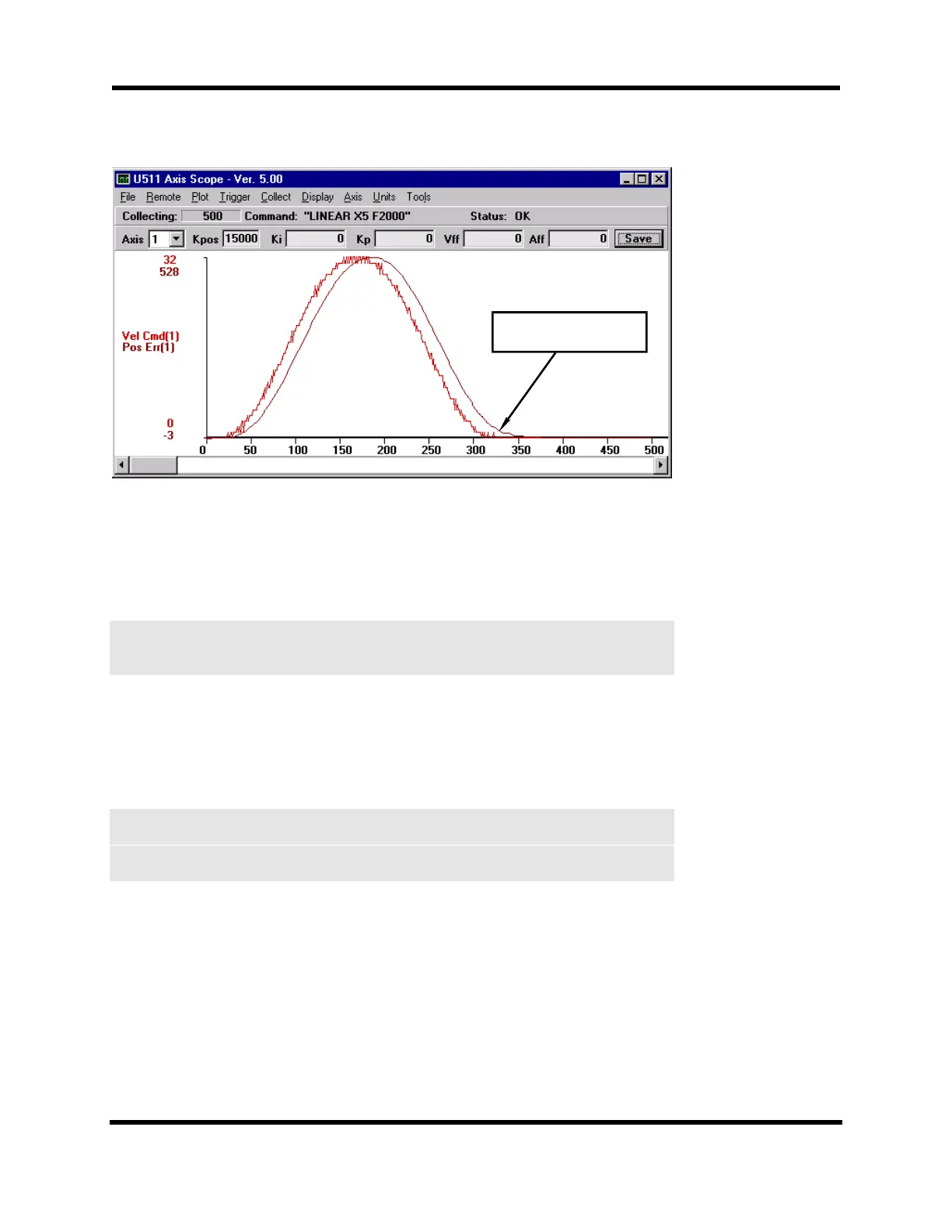
Position Error ends at/near
thesametimetheVelocity
Command does.
Figure 8-28. Plot Illustrating Smoothness in the Position Error
Referring to Figure 8-28, the position error ends at or near the end of the
Velocity Command. The point where the user stops adjusting the “Kpos”
depends upon how much settling time is allowed in the system.
If “Kpos” is too high, the motor will oscillate.
10. Adjust the In-Position Integrator (“Ki”) to remove any drift (DC offset) in the
position error that might not have been removed with the Balance pot. Increasing
“Ki” may help the position error to end closer to the end of the Velocity
Command.
If “Ki” is too high, the settling time will increase as the position error begins to
oscillate after the end of the Velocity Command.
Figure 8-29 is a plot that displays a case where “Ki” is too high and Figure 8-30
shows a plot of the position error with the appropriate “Ki” value.
E
E
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com