Front Panel Operation
3-88
3.9.3 Response time (Digital filter)
The various filter parameters have the following effects on
the time needed to display, store, or output a filtered reading:
• Filter type: The time to the first reading is the same for
both types, but thereafter averaging mode yields a faster
reading than repeating mode. Also, advanced has a fast-
er response to changes in the input signal than averag-
ing.
• Number of reading conversions: Speed and accuracy
are tradeoffs.
• Noise window: For the advanced type, a tradeoff of
speed, accuracy, and response to input signal changes.
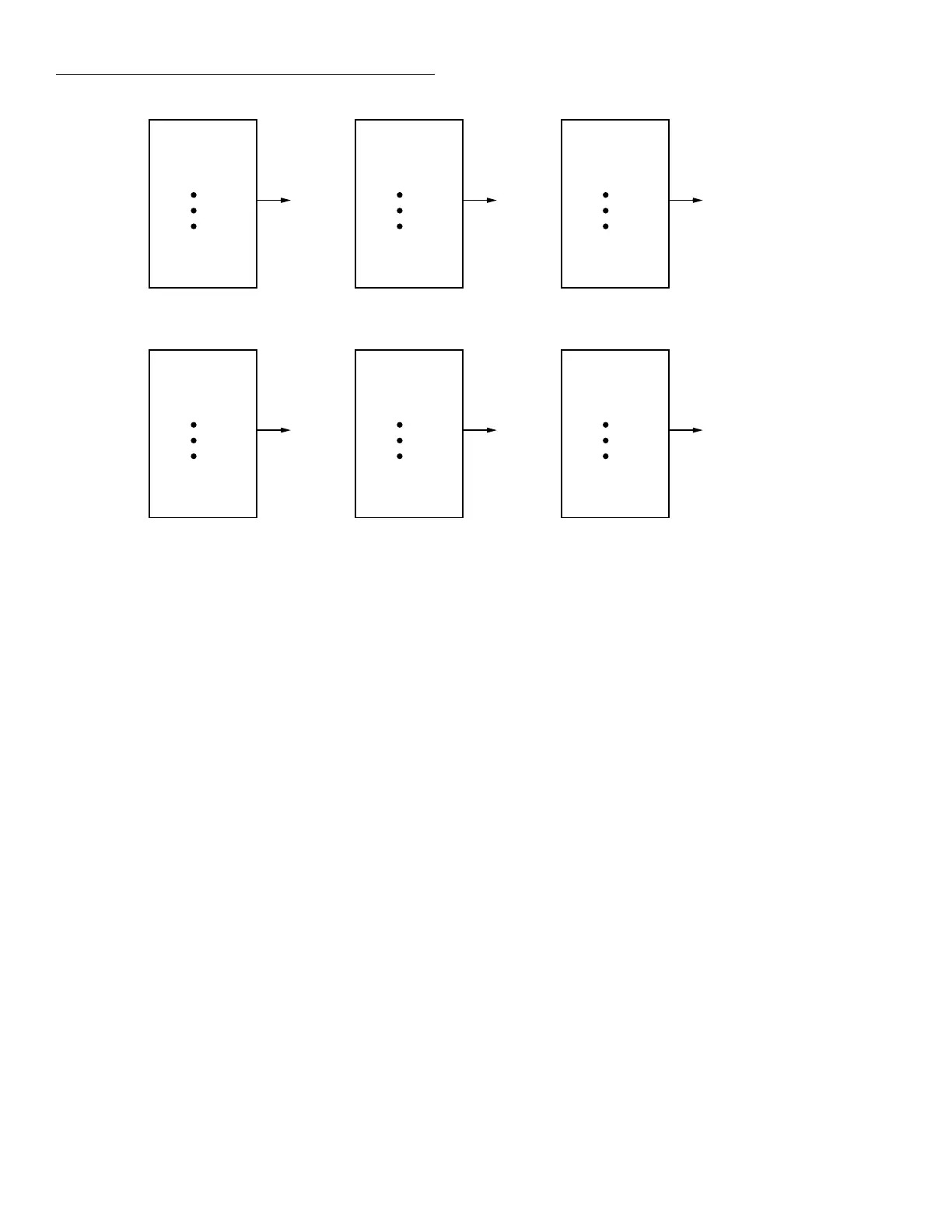
igure 3-40 (cont.)
igital filter
Conversion #10
#9
#8
#7
#6
#5
#4
#3
#2
Conversion #1
Reading
#1
B. Moving Filter Mode; Type - Average, Readings = 10
Conversion #11
#10
#9
#8
#7
#6
#5
#4
#3
Conversion #2
Reading
#2
Conversion #12
#11
#10
#9
#8
#7
#6
#5
#4
Conversion #3
Reading
#3
Conversion #10
#9
#8
#7
#6
#5
#4
#3
#2
Conversion #1
Reading
#1
C. Repeating Filter Mode; Type - Average, Readings = 10
Conversion #20
#19
#18
#17
#16
#15
#14
#13
#12
Conversion #11
Reading
#2
Conversion #30
#29
#28
#27
#26
#25
#24
#23
#22
Conversion #21
Reading
#3
B. Moving filter mode; Type - Average, Readings = 10
C. Repeating filter mode; Type - Average, Readings = 10
3.9.4 Auto filtering (Digital)
For those measurement functions with a filter, one of the pos-
sible selections is automatic filtering. Depending on the mea-
surement function and type, the AUTO selection may disable
filtering. Auto filtering is summarized in Table 3-36.
3.9.5 Configuring the digital filter
Each measurement function except frequency has its own
configuration for a digital filter. A digital filter configuration
menu is shown in Table 3-37.