11. Safety-related functions and interfaces
MiR250 Hook User Guide (en) 01/2023 - v.1.2 ©Copyright 2021-2023: Mobile Industrial Robots A/S. 124
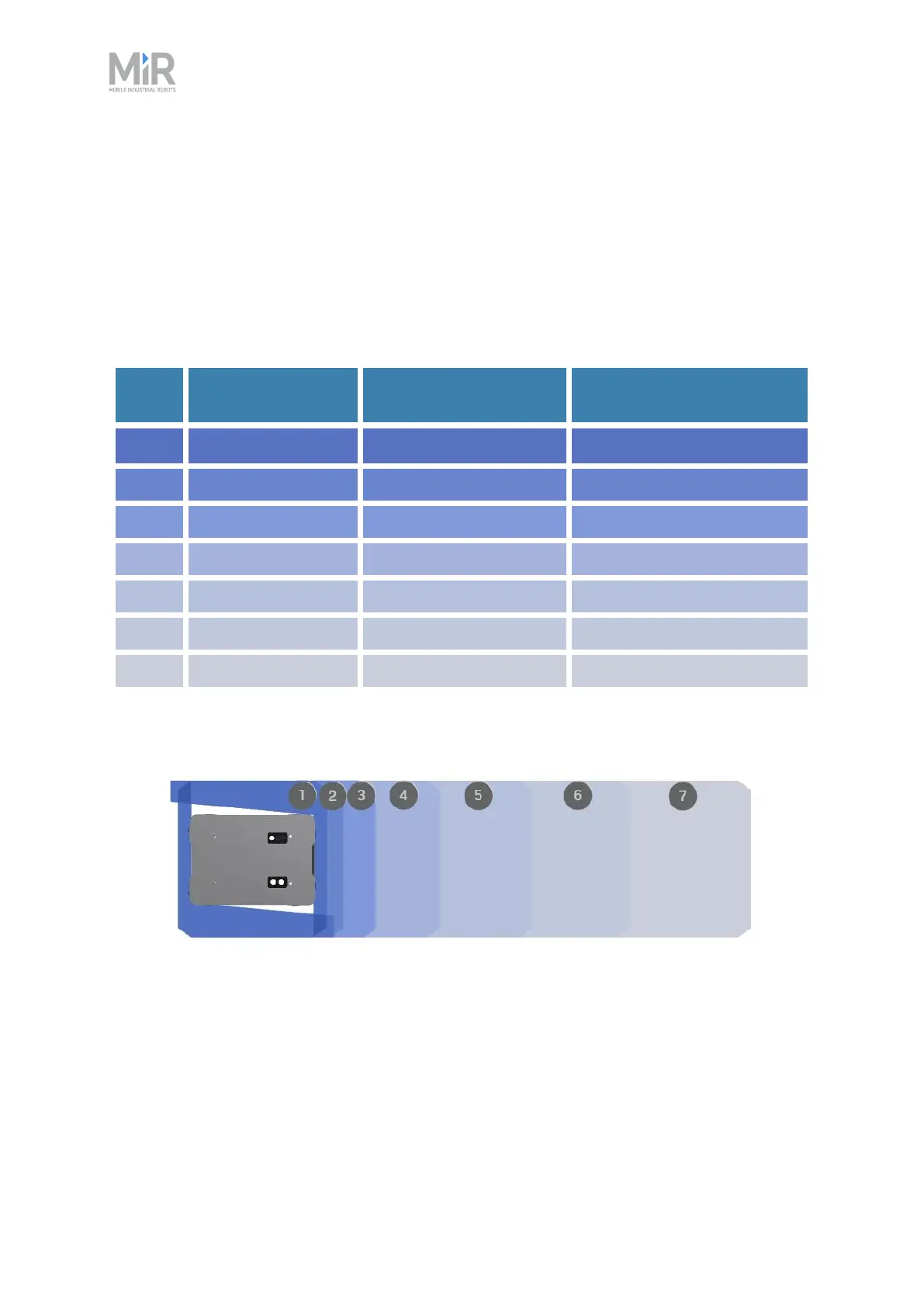
Field set when driving forward
The following table shows speeds and the field ranges when driving forward. The table describes
the length of the Protective field in front of the robot in different cases. Each case is defined by a
speed interval that the robot may operate at. The colors and cases in Table 11.1 correspond to
the field set shown in Figure 11.4.
Case Speed
Protective field
range
Comments
1 0.0 to 0.10 m/s 0-40 mm When pivoting
2 0.10 to 0.30 m/s 0-140 mm
3 0.30 to 0.50 m/s 0-360 mm
4 0.50 to 0.90 m/s 0-780 mm
5 0.90 to 1.30 m/s 0-1350 mm
6 1.30 to 1.70 m/s 0-2100 mm
7 1.70 to 2.10 m/s 0-2850 mm Forward at max. speed
Table 11.1 Range of the robot's Protective fields within its forward speed interval cases.
Figure 11.4 The illustration shows the field set contours when the robot drives forward. The range of the
active field changes with the robot's speed.