159
Rev. 2.0
07/27/2023
MBDV Hardware Manual
10.3 Auto tuning mode
In "auto-tuning mode", the servo system will automatically identify the external load inertia ratio,
automatically select the appropriate mechanical Stiness level, and automatically optimize and
adjust the following contents:
●
Gain (position loop, velocity loop)
●
Filter (torque lter) During auto-tuning, the parameters in the table below will be changed
automatically. After the auto-tuning is completed, the parameters are automatically stored in the
drive.
Parameter Name
Whether manual modication is valid in
auto-tuning mode
P0-02 Load inertia ratio Yes
P0-03 1st mechanical stiness level Yes
P0-05 1st position loop gain no
P0-07 1st position loop derivative time constant no
P0-08 1st position loop derivative lter no
P0-09 Velocity feedforward gain no
P0-10 Velocity feedforward lter frequency no
P0-11 1st velocity command gain no
P0-12 1st velocity loop gain no
P0-13 1st speed loop integral time constant no
P0-14 Acceleration feed forward gain no
P0-15 Acceleration feedforward lter frequency no
P0-16 1st command torque lter frequency no
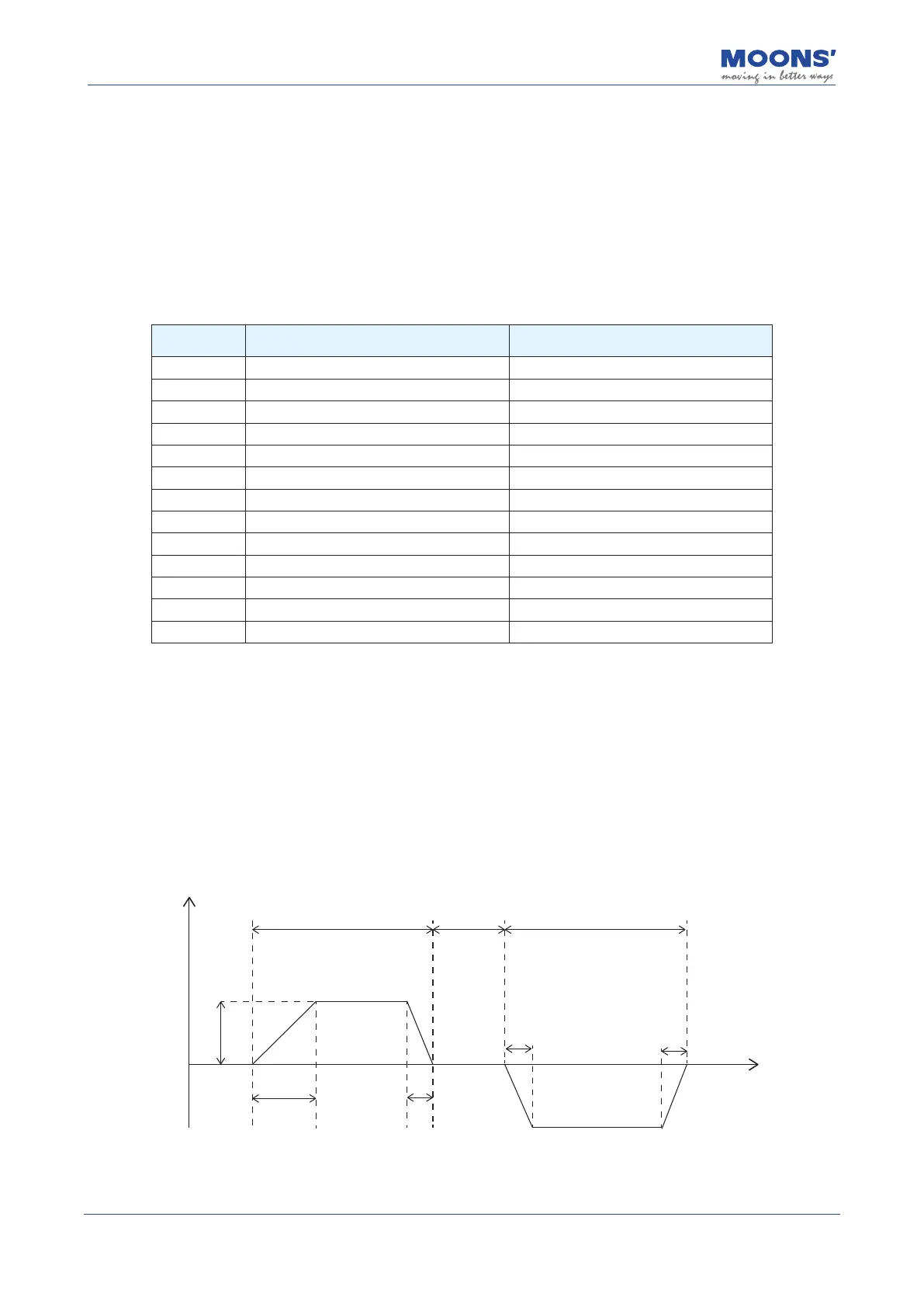
10.3.1 Auto-tuned motion prole conditions
In order to accurately complete the automatic tuning of parameters, it is necessary to set a
reasonable motion trajectory, including distance, running speed, running time, acceleration and
deceleration, and interval time between two movements.
Running time: greater than 0.5 seconds
Running speed: greater than 180rpm
Acceleration and deceleration: greater than 30rps/s
Interval time: greater than 1.5 seconds
Running Time
Running Time
Interval Time
Speed
Running
Speed
Acceleration
Acceleration
Deceleration
Deceleration
Time
Before starting auto-tuning, it is recommended that the mechanical Stiness level of P0-03 be 5