168
Rev. 2.0
07/27/2023
MBDV Hardware Manual
10.5 Resonance suppression
The machanical system has an inherent resonance frequency. If the whole system runs at this
mechanical resonance frequency poit, vibration and nosie may be caused.
M3 series provide 4 methods to suppress mechanical resonance.
1
)
T
orque Command Filter
2
)
Notch Filters
3
)
End Eector Suppress
4
)
Lod Disturbance Suppress
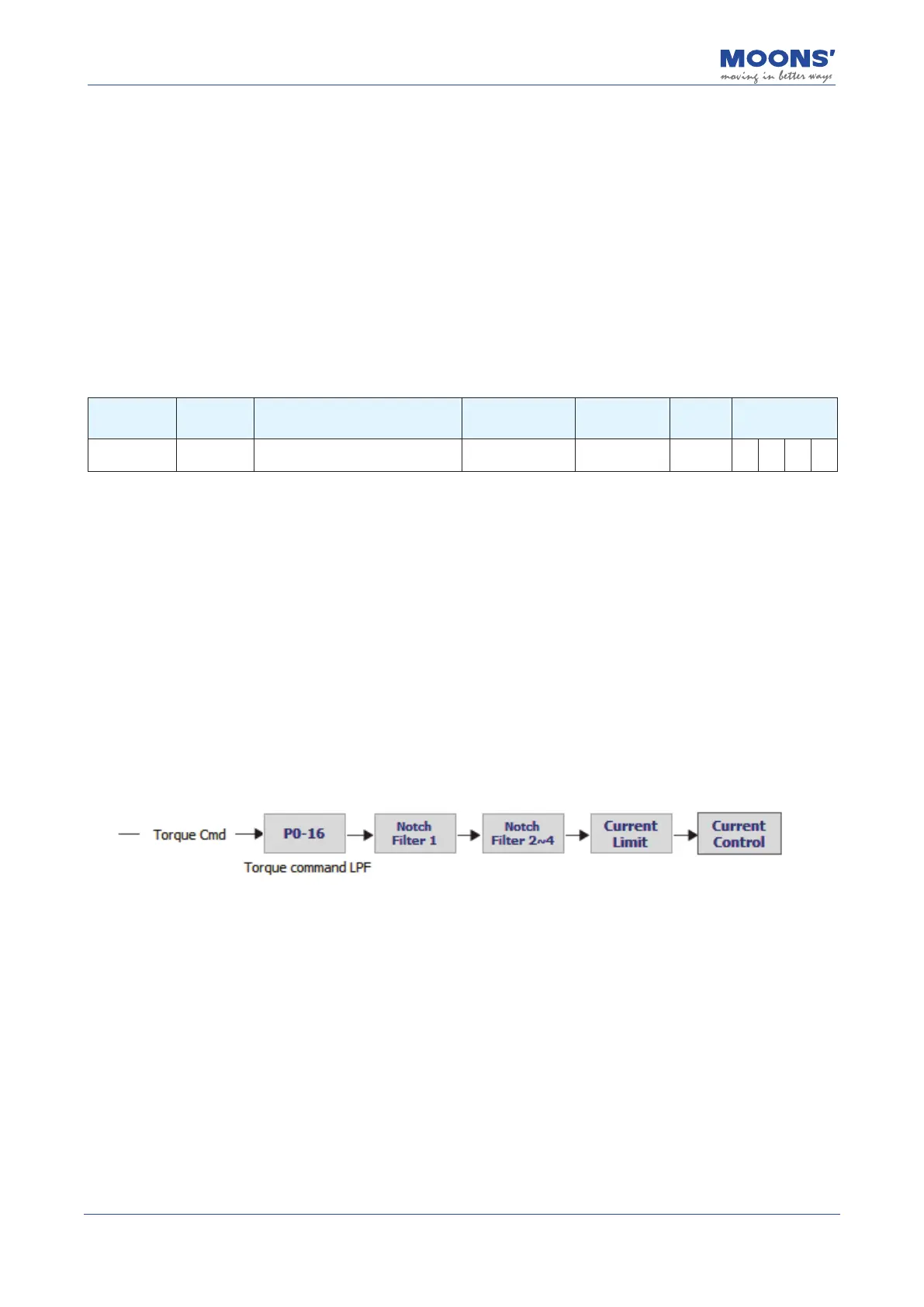
10.5.1 Torque Command Filter
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P0-16 KC 1st Torque Command Filter 1099 0 ~ 40000 01Hz P S T
Filter the command torque of Current Loop.
The lter is a single-output low-pass lter, which is used to lter the output of the PID controller
(that is, the reference current). When setting this value, consider the cuto frequency required for
system operation. The default value of 1099 can be used in most applications.
Used in some particular applications, such as:
1) Make sure the frequency of Torque Command Filter(KC) should 3 time higher than Velocity Loop Gain.
2) There are vibration with audible noise in the mechanical system. You can try reducing this value.
3) There is a mechanical resonance, the low-pass lter cuto frequency can be set below the
resonance frequency point so that the output of the control loop will not excite the resonance.
4) In a large inertia load system, increasing the position loop gain KP can obtain a good system
response. However, excessive gain will cause jitter, and this lter could be used to be reduced to
prevent jitter and vibrati