83
Rev. 2.0
07/27/2023
MBDV Hardware Manual
7.3.7 Velocity control Mode methods
In velocity control mode, there are two control types:
1. Position over time
2. Speed control only (default setting)
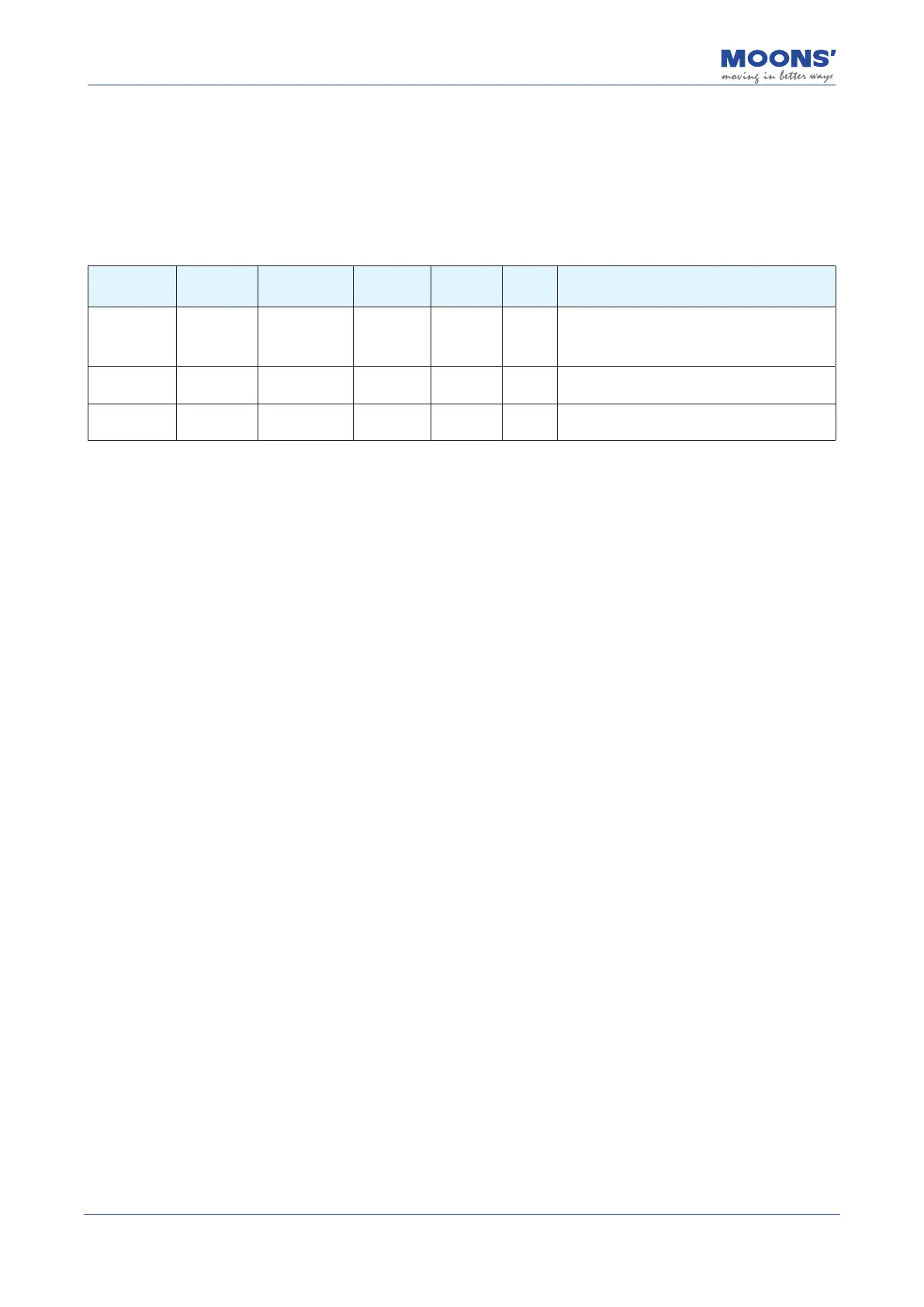
Related parameters
Parameter Instruction Name
Value
range
Defaults Unit Describe
P1-03 JM
Velocity
control method
1
,
2 2 -
Set the control type in speed mode
1. Position over time
2. Speed control only (default setting)
P0-12 VP
Speed loop
proportional
0 ~ 30000 183 0.1Hz
In the set speed mode, when P-15(JM) is 2, the
speed loop proportional coecient
P0-13 VI
Speed loop
integral tim
0 ~ 30000 189 ms
In the set speed mode, when P-15(JM) is 2, the
speed loop integral coecient
A) P1-03 = 1, the position error is detected in real time.
Under this control type, the position error will be detected in real time. When the absolute value of
the dierence between the actual position fed back by the encoder and the command position, that
is, the position error exceeds P3-04 (position error alarm limit), The drive will generate a fault alarm
that the position error exceeds the limit.
B) P1-03 = 2, speed control only
Under this control type, no position error is detected, and no alarm will be generated even if the
motor is locked. In this control mode, the speed loop gain parameter is set by P0-12 speed loop
proportional gain and P0-13 speed loop integral time.