84
Rev. 2.0
07/27/2023
MBDV Hardware Manual
7.4 Torque control mode
7.4.1 Commanded torque control
Torque control mode is used for precise torque control. MBDV servo drives support command
torque mode. Command torque mode uses communication commands to control the motor.
Model Control signal
P1-00(CM)
denition
Description
Command torque
mode
communication command 1 Using Modbus command
7.4.2 Torque command lter
Filtering is performed on torque commands to ensure changes in torque output are gradual and
thereby reduce mechanical vibrations in the system.
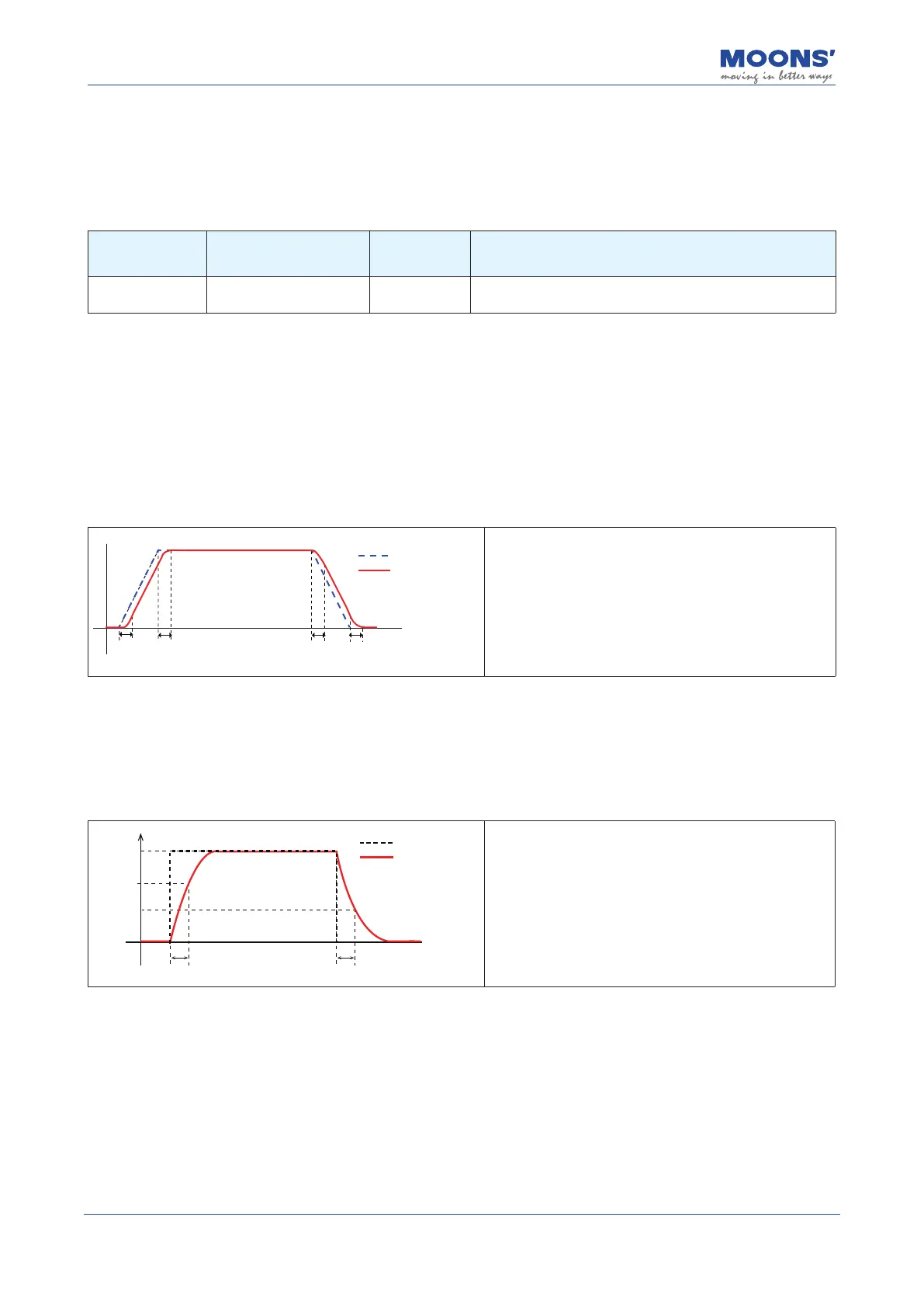
◆
Jerk time
Parameter P2-05 jerk time takes eect in internal trajectory modes (position, speed, torque) and
communication based control mode. The eect of jerk smoothing on the input command is shown
in the gure below.
Target Speed Curves
T T T
T=P2-05
Time
Speed
Filtered speed Curves
◆
Jerk time lter will produce a certain delay T for the
instruction, but it will not aect the nal positioning accuracy.
◆
The larger the P2-05 time constant, the more obvious the
smoothing eect will be, and the delay of instruction response
will increase, so users should set the appropriate lter time
constant according to the application.
◆
Low pass lter
Parameter P2-28 low-pass lter can take eect in internal trajectory modes. (position, speed,
torque), and communication based control mode.
The smoothing eect of the low-pass smoothing lter on the input command is shown in the gure
below.
Motor Speed
Target Speed Instruction
Filtered Speed
V
C
V
C
×0.632
V
C
×0.368
P2-28 P2-28 Time
◆
Low-pass ltering will produce a certain delay T for the
instruction pulse, but it will not aect the nal positioning
accuracy.
◆
The larger the time constant of P2-28, the more obvious the
smoothing eect will be, and the delay of instruction response
will be increased. Users should set the appropriate lter time
constant according to the application.