138
Rev. 2.0
07/27/2023
MBDV Hardware Manual
8.3.3 P2-XX: Trajectory--- trajectory planning
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P2-00 VM Maximum Velocity 80 0 ~ 100 rps P S T F
Set the maximum running speed of the motor.
When the actual speed of the motor exceeds the set value of P2-00, r12OV (motor stall alarm) will be generated.
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P2-01 AM Maximum acceleration/deceleration 3000 0.167 ~ 5000 rps/s P S T F
Sets or requests the maximum acceleration/deceleration allowed. When the set acceleration / deceleration is greater than the set maximum
value, the actual running acceleration / deceleration will be limited to the maximum value.
At the same time, this value is also the maximum braking deceleration value after the emergency stop command or hitting the limit switch.
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P2-02 JS Jog velocity 10 -100 ~ 100 rps P S T
Sets or requests the speed for Jog moves in rev/sec.
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P2-03 JA Jog acceleration 100 0.167 ~ 5000 rps/s P S T
Sets or requests the accel/decel rate for Jog moves in rev/sec/sec. Sending JA with no parameter causes drive to respond with
present jog accel/decel rate. Setting JA overwrites the both the last JA and JL values. This means that to have dierent jog accel and
jog decel values, you should rst send JA to set the jog accel and then send JL to set the jog decel. The JA value cannot be changed
while jogging.
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P2-04 JL Jog deceleration 100 0.167 ~ 5000 rps/s P S T
Sets or requests the decel rate for Jog moves and velocity (oscillator) modes in rev/sec/sec. The JL value cannot be changed while
jogging. JA sets both the JA and JL values, so when a dierent JL value is required set JA rst, then set JL
Parameter Instruction Name Defaults Range Unit
Related
Patterns
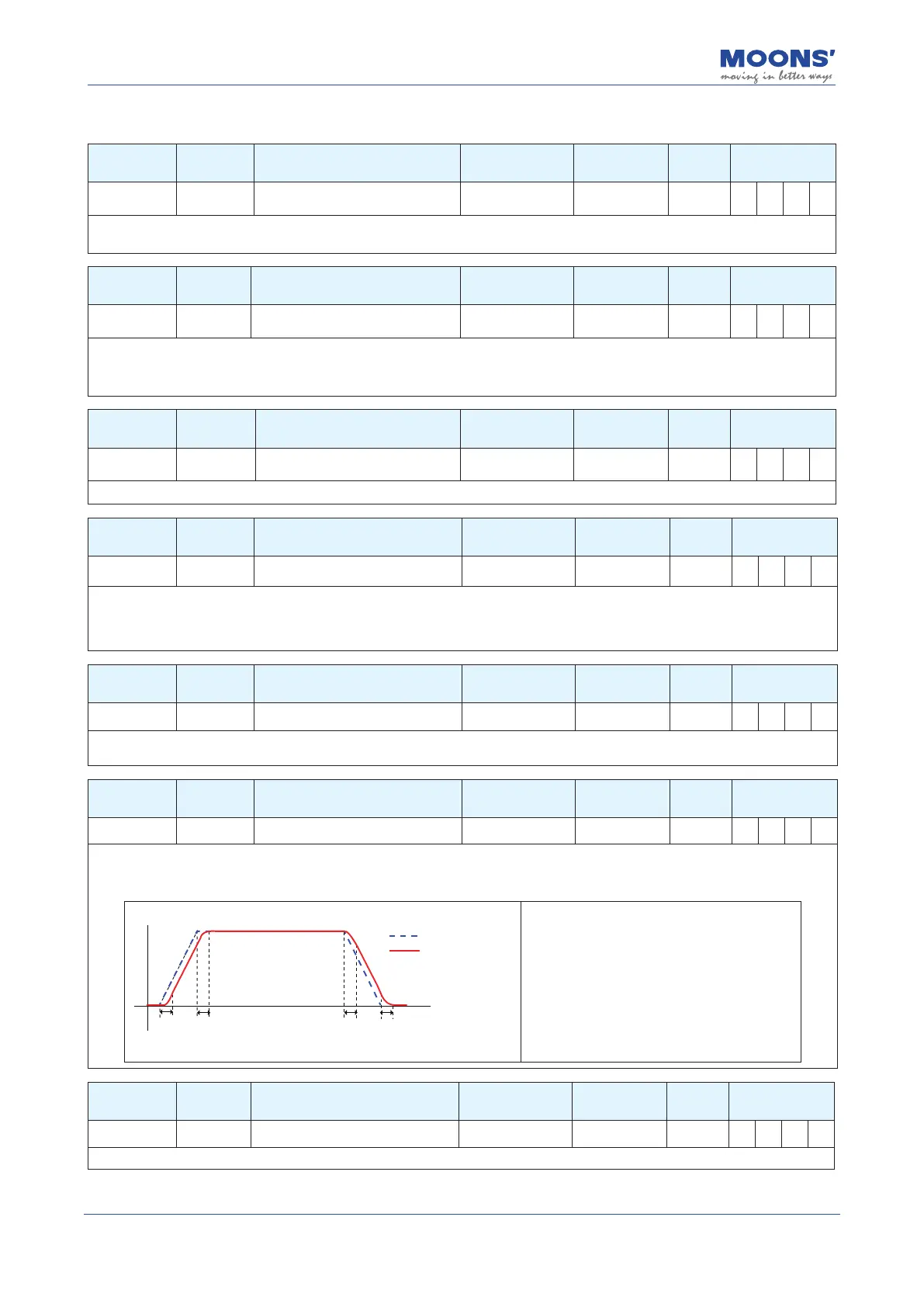
P2-05 JT Jerk time 10 0 ~ 125 ms P S T F
Parameter P2-05 jerk time takes eect in internal trajectory mode (position, speed, torque), analog position, analog speed, analog
torque, or communication command control.
The eect of jerk smoothing on the input command is shown in the gure below.
Target Speed Curves
T T T
T=P2-05
Time
Speed
Filtered speed Curves
◆
The acceleration lter will cause a certain
delay to the command T, but will not aect the
nal positioning accuracy
◆
The larger the time constant of P2-05 is, the
more obvious the smoothing eect is, and the
command response delay will also increase.
A reasonable lter time constant should be set
according to the actual application.
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P2-06 VE Target Velocity (point-to-point) 10 0.0042 ~ 100 rps P S T F
The target speed command in point-to-point command position mode.