86
Rev. 2.0
07/27/2023
MBDV Hardware Manual
7.4.4 Output during speed limiting
In torque control mode, when the maximum speed limit is reached, an output signal will be output
notifying the user. The following are the parameters of this signal:
Type Signal name Set value Signal logic Function
Output V-LMT
21
Closed
The output speed of the motor is limited, the output signal, the output state is
closed
Open
The output speed of the motor is not limited, no signal is output, and the output
state is open
22
Open The output speed of the motor is limited, the output signal, the output state is open
Closed
The output speed of the motor is not limited, no signal is output, and the output
state is closed
Note: Please refer to 7.1.2 Output signal setting
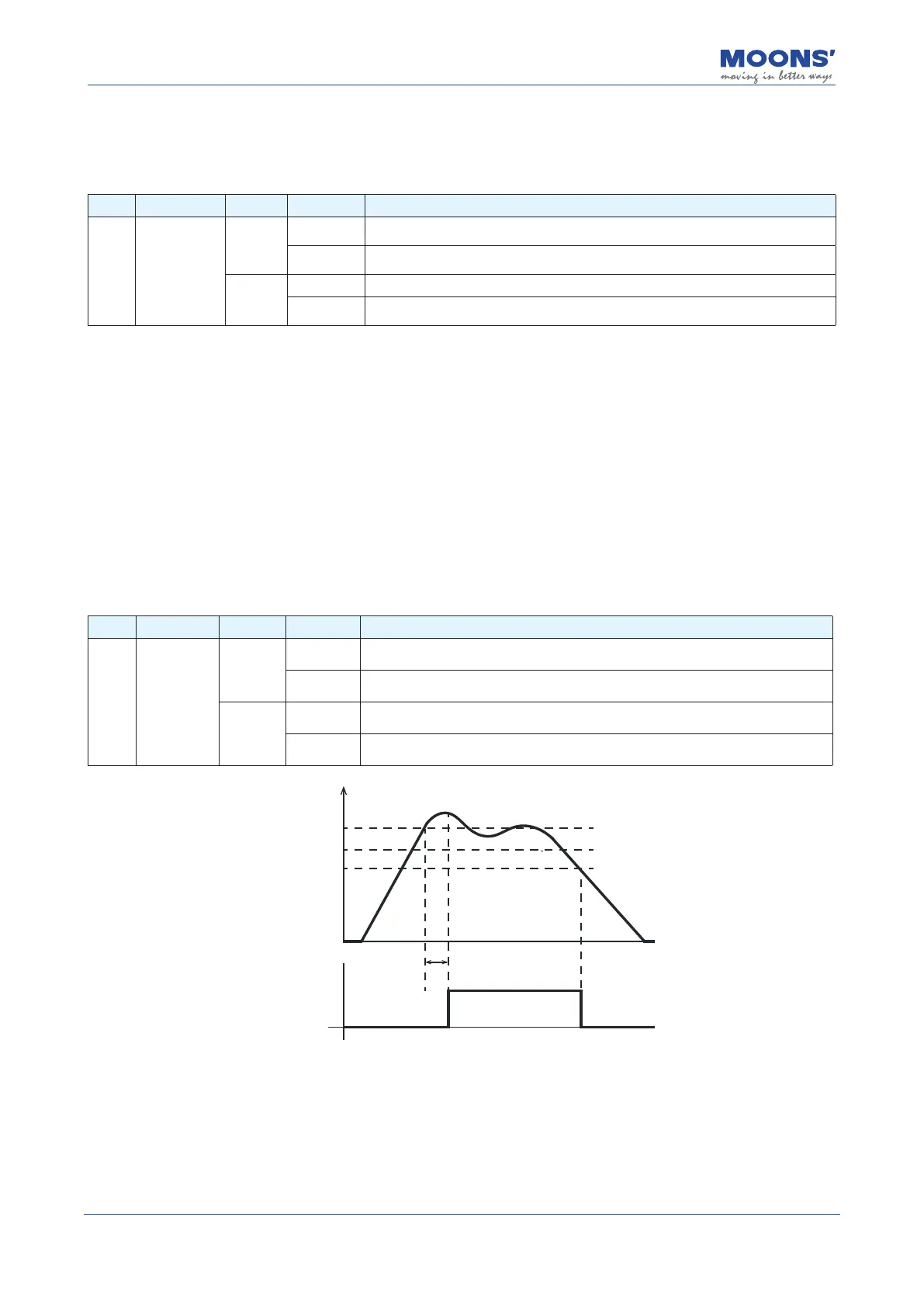
7.4.5 Torque reaches output
When operating in torque control, if the absolute value of the actual torque reaches the target
torque (P1-07), remains within the permissible uctuation range (P5-45) for the amount of time
specied by P5-40, the Torque Reached output signal (TQ-REACH) will be output.
If any of the above conditions is not satised, the TQ-REACH signal will not be output.
TQ-REACH is applicable in all supported control modes (Torque, Velocity, Position etc.)
◆
Setting of torque arrival signal TQ-REACH
When using the torque arrival signal TQ-REACH, a digital output pin needs to be assigned this
function.
Type Signal name Set value Signal logic Function
Output TQ-REACH
13
Closed
TQ-REACH conditions satised, the signal is output and the state of the output is
closed.
Open
TQ-REACH conditions not satised, the signal is not output and the state of the
output is open.
14
Open
TQ-REACH conditions satised, the signal is output and the state of the output is
open.
Closed
TQ-REACH conditions not satised, the signal is not output and the state of the
output is closed.
P1-07+P5-45
P1-07
P1-07-P5-45
Torque
Time
Torque Arrival Signal
Output
No Output No Output
P5-40
0