97
Rev. 2.0
07/27/2023
MBDV Hardware Manual
7.8.1 Back to the origin basic concept
Back-to-origin is used to nd the mechanical origin and locate the positional relationship between
the mechanical origin and the mechanical zero. Mechanical origin: a xed position on the machine,
which can be a certain sensor or the Z - phase signal of the motor. Mechanical zero point: the
absolute 0 position on the machine.
After returning to the origin, the position where the motor stops are the machine origin. By setting the
origin oset P2-27, the relationship between the machine origin and the machine zero can be set:
Mechanical origin = mechanical zero + P2-27
When P2-27=0, the mechanical origin coincides with the mechanical zero.
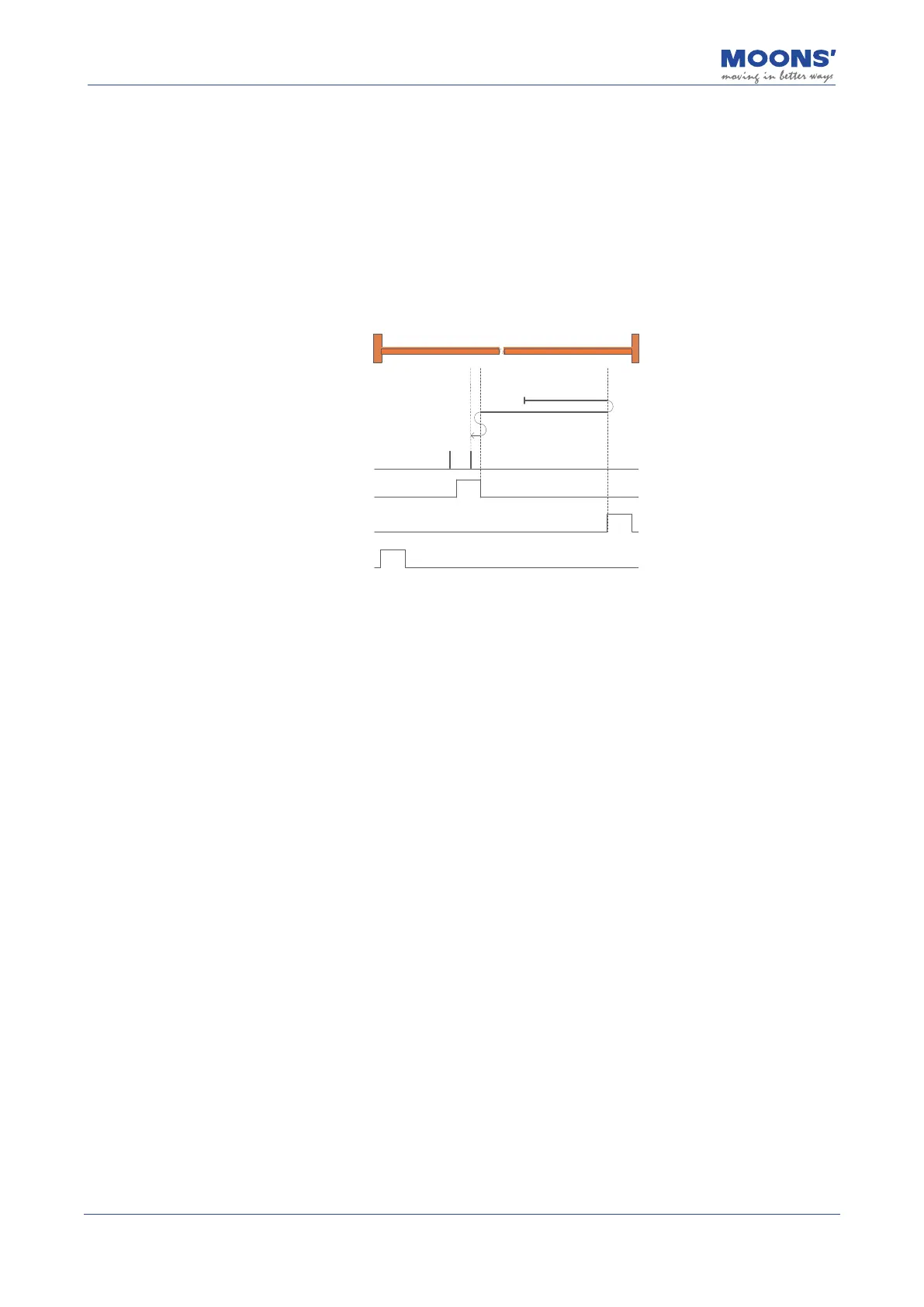
Movement track
Z-Phase
Signal Home
Positive Limit Switch Signal
H
H
L
Negative Limit Switch Signa
H: The rst speed of returning to the origin P2-24
L: The rst speed of returning to the origin P2-25
Origin switch signal: set digital input X1 ~ One of the inputs in X4 is the origin switch, HOM-SW=0
means the origin signal is invalid, HOM-SW=1 means the origin signal is valid.
Positive limit switch signal: set digital input X1 ~ One of the inputs in X4 is the positive limit switch,
POT=0 means the positive limit signal is invalid, POT=1 means the positive limit signal is valid.
Negative limit switch signal: set digital input X1 ~ One of the inputs in X4 is the negative limit
switch, NOT=0 means the negative limit signal is invalid, and NOT=1 means the negative limit signal
is valid.
7.8.2 Introduction to the way of returning to the origin
◆
The back-to-origin mode -4~-1 is the manufacturer-dened back-to-origin mode. The driver does
not need an external switch signal as an auxiliary signal for back-to-origin, but limits the torque of
the motor during the process of back-to-origin. When the mechanical hard limit is connected to the
motor-driven When the load is contacted and blocked, the thrust generated by the motor-driven load
is equal to the blocking force, and when the motor is stationary, the position is considered as the
mechanical origin. The torque limit of the motor during the back-to-origin process is set through P0-
08 (torque limit of the hard limit back-to-origin mode), 100% corresponds to 1 time the rated torque of
the motor; set the value of this object according to the actual application, too small setting value may
result in inaccurate return-to-origin position, and too large setting value may damage mechanical
equipment.
Note: When using the back-to-origin method -4~-1, it is necessary to set a suitable back-to-origin
oset P2-27, so that after nding the mechanical origin during the process of back-to-origin, the
distance of the origin oset P2-27 is reversed, and the load is away from the mechanical hardware.
Limit, the actual position after the motor stops is 0.
◆
The homing mode 1~35 is the homing mode dened according to the CiA402 motion control
protocol.
Note:
When using the back-to-origin method 1~35, after the motor back-to-origin is completed, the
actual position of the motor is the value of the origin oset P2-27.