98
Rev. 2.0
07/27/2023
MBDV Hardware Manual
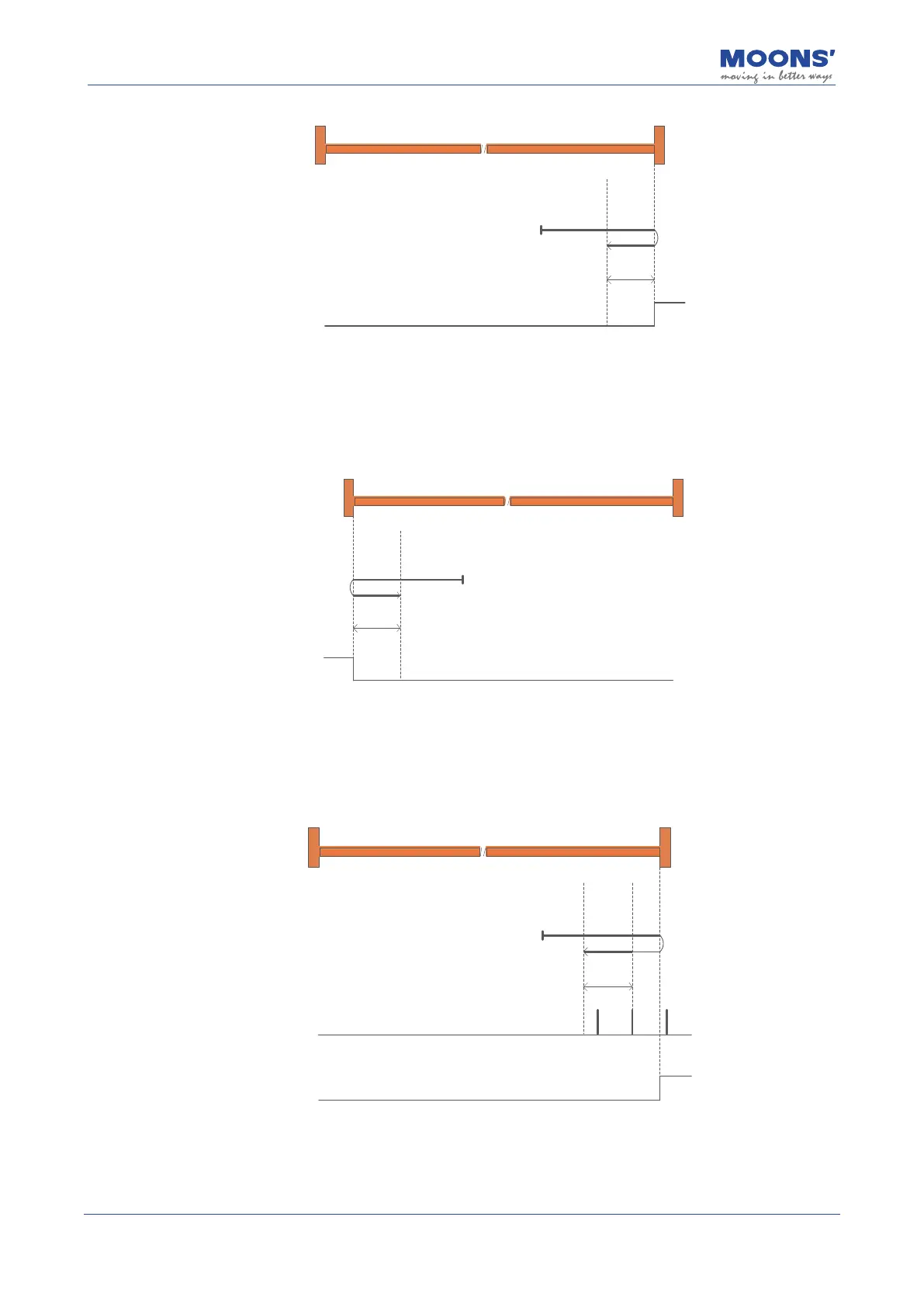
7.8.2.1 Return-to-origin method -4: forward return, look for forward mechanical hard limit
Movement Track
Positive Mechanical Hard Limit
H
H
Offset
a) Start the return at positive high speed, decelerate to stop when the mechanical hard limit meets
the torque equal to the blocking force and the motor limit, run at the negative high speed by the
distance of the origin oset P2-27, and the position of the motor is 0 after stop.
7.8.2.2 Return-to-origin method -3: Negative return, looking for negative mechanical hard
limit
Negative mechanical hard limit
H
H
Movement Track
Offset
Offset
a) Start the return at a negative high speed, decelerate and stop when the mechanical hard limit
meets the torque equal to the blocking force and the motor limit, run at a positive high speed by the
distance of the origin oset P2-27, and the position of the motor is 0 after stopping.
7.8.2.3 Return-to-origin method -2: forward return, look for forward mechanical hard limit
and Z -phase pulse signal
Positive Mechanical Hard Limit
H
H
L
Offset
Movement Track
Z-phase Signal
a) Start the return at a positive high speed, decelerate and stop when the mechanical hard limit
meets the torque equal to the blocking force and the motor limit, run at a negative low speed, stop
when encountering the rst Z pulse, and run at a negative high-speed origin oset the distance of
P2-27, the position of the motor after stop is 0.