94
Rev. 2.0
07/27/2023
MBDV Hardware Manual
7.7 Dynamic braking
Dynamic braking can be used when a fault occurs at the motor or at the drive.. Dynamic braking is
implemented by short circuiting the U/V/W phases of the motor. This brings the motor to a stop at
the highest deceleration rate and is meant to protect personnel and equipment.
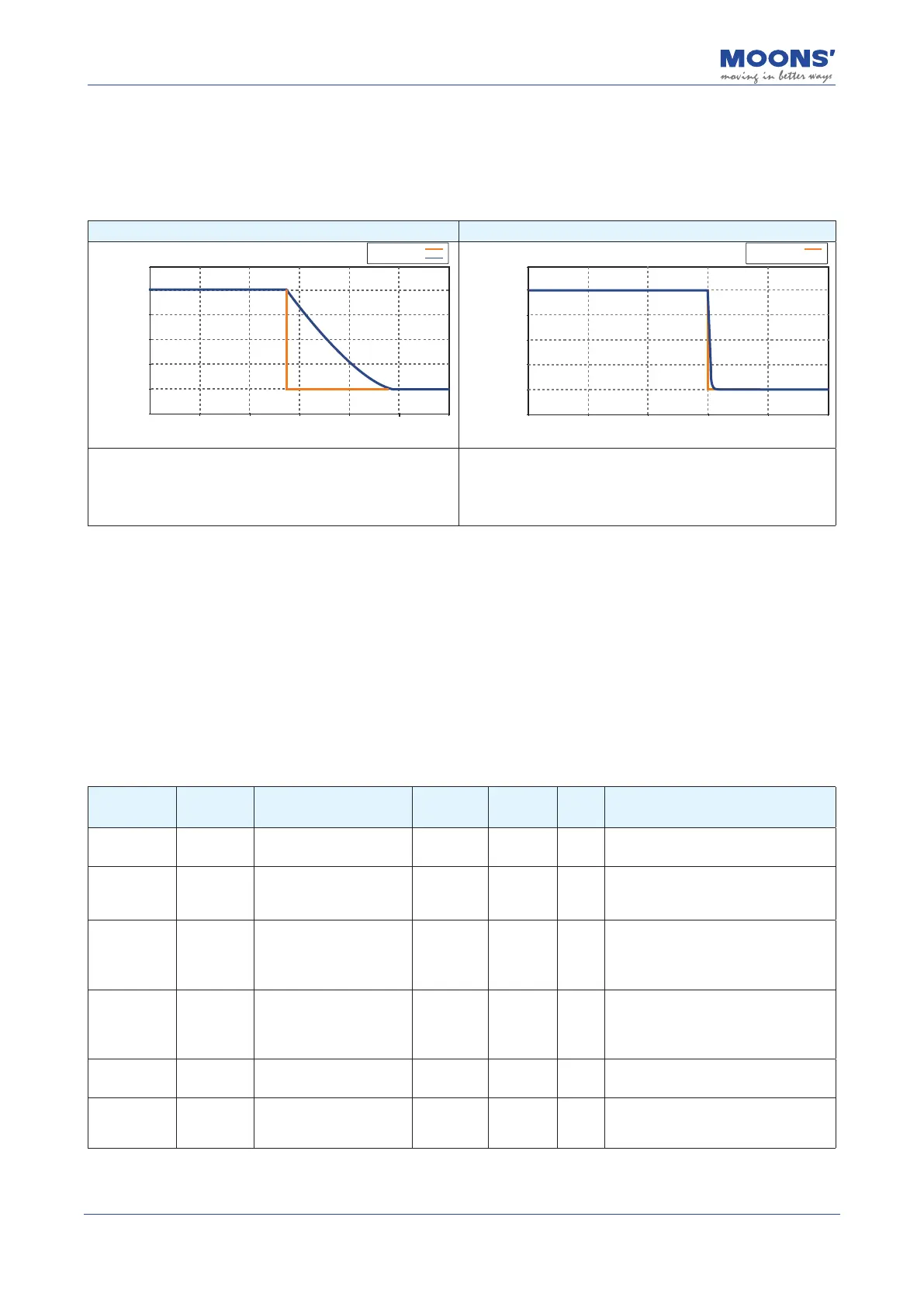
Stopping without dynamic braking Stopping with dynamic braking
0
-250
250
500
750
1000
1250
0 250 500 750 1000 1250 1500
Command Speed
Actual Speed
Speed[rpm]
Time [ms]
0
-250
250
500
750
1000
1250
0 200 400 600 800
Command Speed
Actual Speed
Speed[rpm]
Time [ms]
In this scenario, the driver exhibits a fault and is disabled. This
results in the motor coming to an uncontrolled deceleration that
is inuenced purely by external factors such as the speed of the
motor before fault, inertia of the system and the friction present in
the system.
In this scenario, the driver exhibits a fault and the driver is
disabled. The phases (U/V/W) of the servo motor are shorted and
the current generated by the back EMF of the motor windings is
used to stop the motor. This greatly reduces deceleration time and
protects personnel as well as equipment.
Note:
1. Dynamic Braking with Quick Stop
• Do not start and stop the motor through the servo enable /o function.
2. Dynamic braking is only suitable for short-term use, and it is only used in the case of abnormal
servo OFF, drive error, etc.
• After the dynamic brake is used to stop at high speed, it can be used again after an interval
of 10 minutes.
3. Dynamic Braking function disabled in case of drive power loss
Related parameters
Parameter Instruction Name
Value
range
Defaults Unit Description
P1-29 YV
The action of the dynamic
brake when it is disabled
0 ~ 5 0 -
Dynamic braking sequence when drive
receives Servo O signal
P1-30 YR
The action of the dynamic
brake when an error is
reported
0 ~ 3 0 -
Dynamic braking sequence when fault
occurs at the drive.
P1-31 YM
The maximum action time
of the dynamic brake
during the deceleration
process of the deactivation
0 ~ 30000 500 ms
Maximum time of dynamic braking when
drive receives Servo O signal.
P1-32 YN
The longest action time of
the dynamic brake during
the deceleration process of
the error
0 ~ 30000 0 ms
Maximum time of dynamic braking when
a fault occurs at the drive.
P1-37 DV
Dynamic braking action
speed
0 ~100 50 rps
Maximum motor velocity at which
dynamic braking will be activated.
P5-42 ZV
Zero speed judgment
threshold
0.1 ~ 2 0.5 rps
When the speed is less than or equal to
this set value, the drive considers that it
is in the zero-speed state at this time