165
Rev. 2.0
07/27/2023
MBDV Hardware Manual
10.4.2 Parameters in Advanced Tuning Mode
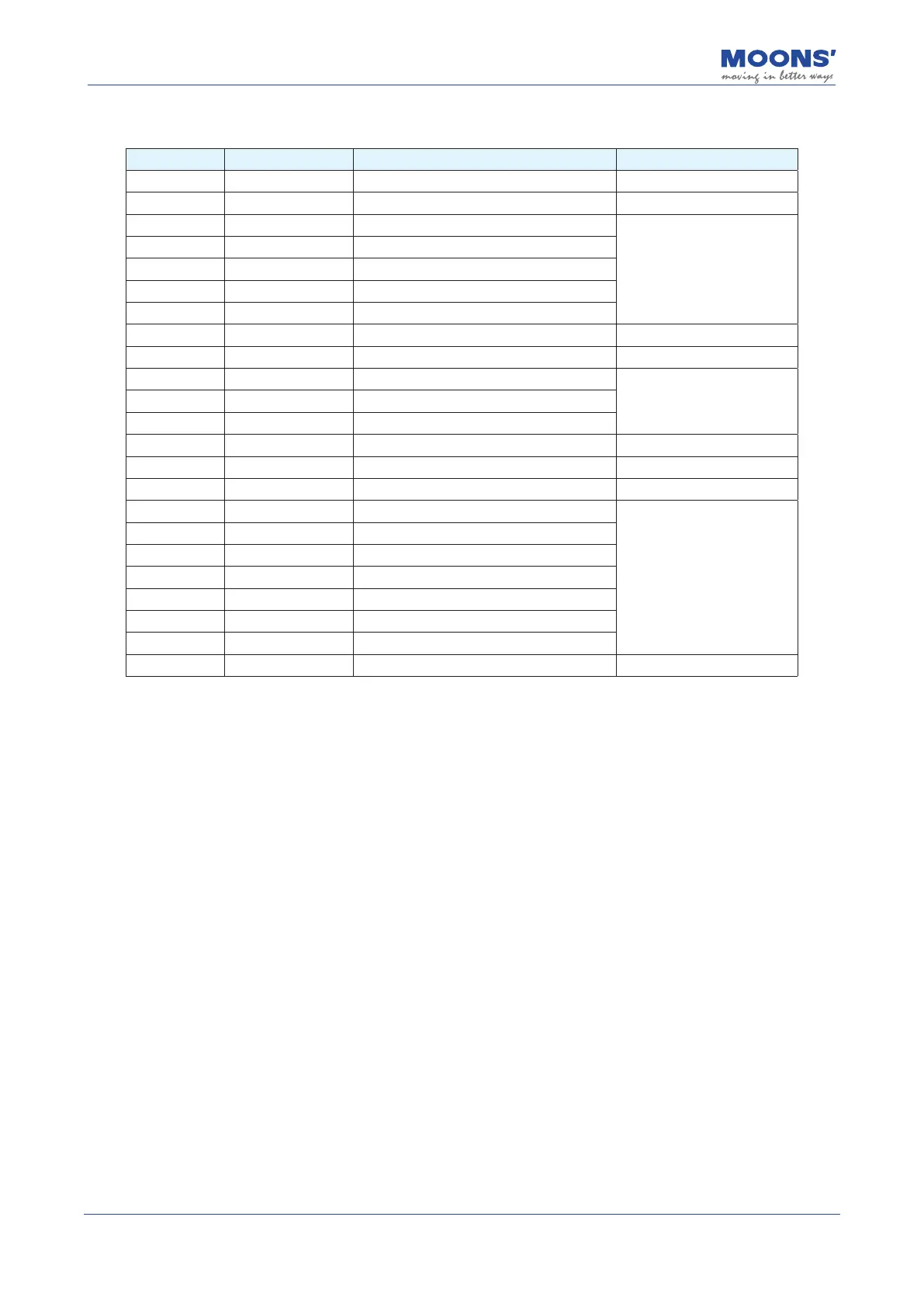
Parameter Command Function Type
P0-01 LY load type
P0-02 NR Load inertia ratio
P0-03 KG 1st mechanical stiness level
First set of gains
P0-04 KX 2nd mechanical stiness level
P0-05 KP 1st position loop gain
P0-07 KD 1st position loop derivative time constant
P0-08 KE 1st position loop derivative lter
P0-09 KL Velocity feedforward gain
P0-10 KR Velocity feedforward lter frequency
P0-11 KF 1st velocity command gain
First set of gainsP0-12 VP 1st velocity loop gain
P0-13 VI 1st speed loop integral time constant
P0-14 KK Acceleration feed forward gain
P0-15 KT Acceleration feedforward lter frequency
P0-16 KC 1st command torque lter frequency First set of gains
P0-17 UP 2nd position loop gain
The second set of gains
when using gain switching
P0-19 UD 2nd position loop derivative time constant
P0-20 UE 2nd position loop derivative time constant
P0-21 UF 2nd velocity command gain
P0-22 UV 2nd velocity loop gain
P0-23 UG 2nd velocity loop integral time constant
P0-24 UC 2nd command torque lter frequency
P0-39 LR Velocity Feedback Filter
Note:
1) When using gain switching, the second group of gains is valid.