69
Rev. 2.0
07/27/2023
MBDV Hardware Manual
7.1.13 Dynamic position error output
The dynamic position error following output refers to the output of this signal when the dierence
between the actual position of the motor and the command position is greater than P5-38
(Dynamic position error threshold) during the operation of the motor.
Type Signal name Setup Value Signal Logic Function
Output DYM-LMT
11
Closed
When the dynamic following error exceeds the setting of P5-38, the DYM-
LMT signal is output, and the output state is CLOSED.
Open
When the dynamic following error does not exceed the setting of
P5-38, the DYM-LMT signal will not output, and the output state is OPEN.
12
Open
When the dynamic following error exceeds the setting of P5-38, the DYM-
LMT signal will NOT output, and the output state is OPEN.
Closed
When the dynamic following error does not exceed the setting
of P5-38, the DYM-LMT signal is output, and the output state is
CLOSED.
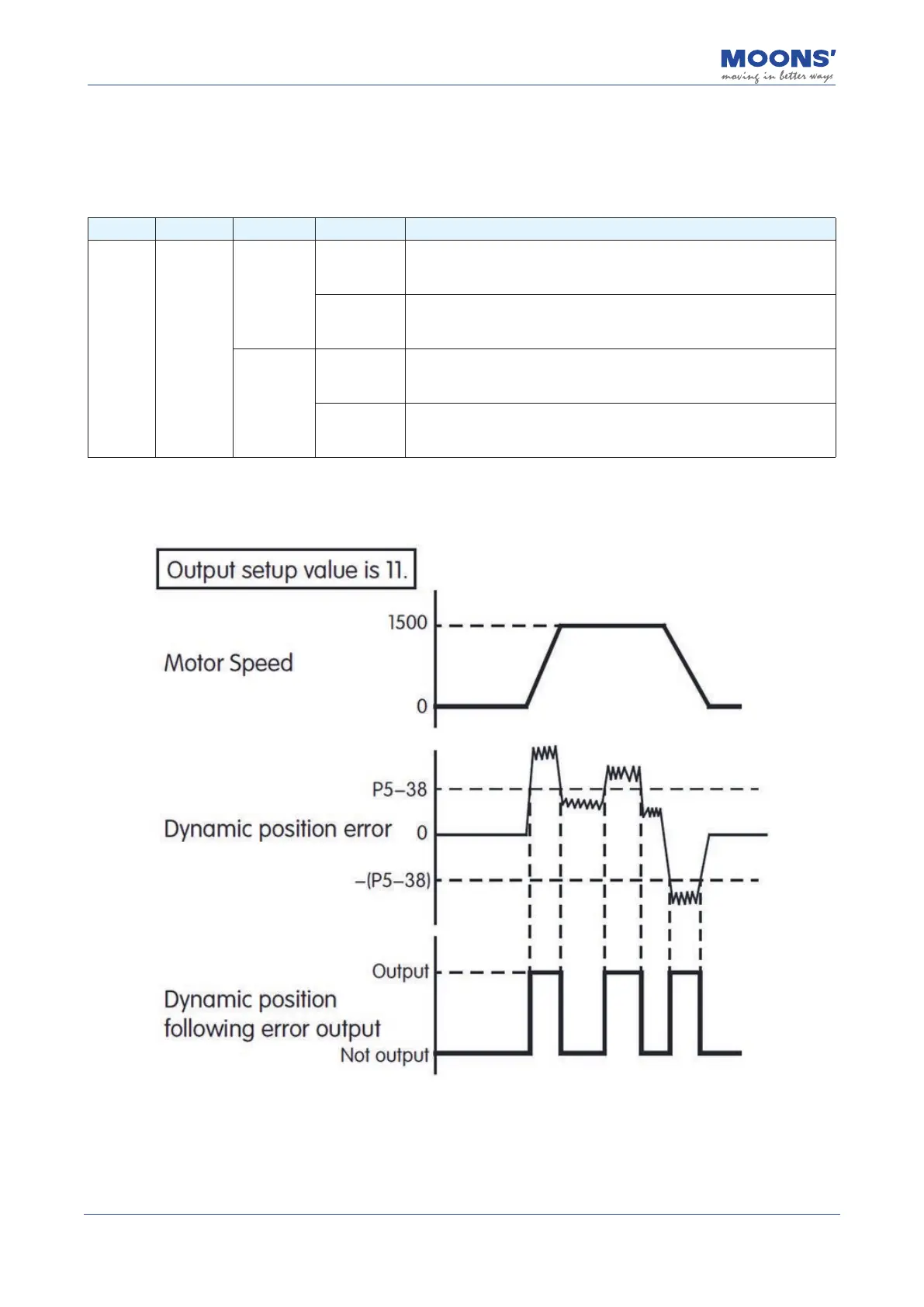
The following gure is a timing diagram of the setting value of 11, that is, the error exceeds the
setting of P5-38, dynamic position error threshold, and the output state is Closed.