66
Rev. 2.0
07/27/2023
MBDV Hardware Manual
7.1.9 Warning output
When a warning occurs, the drive will have a warning output and the servo system maintains
current working status.
To use this function, a digital output of the servo drive is congured as WARN function.
Parameters P5-12 ~ P5-17 set the function of the digital output Y1 ~ Y2 of the drive.
Type Signal name Setting Signal logic Function
output WARN
3
Closed
The drive generates an abnormal warning, and the output is in
the Closed state
Open
The drive is normal, there is no abnormal warning, and the
output is in the Open state
4
Open
The drive generates an abnormal warning, and the output is in
the Open state
Closed
The drive is normal, there is no abnormal warning, and the
output is in the Closed state
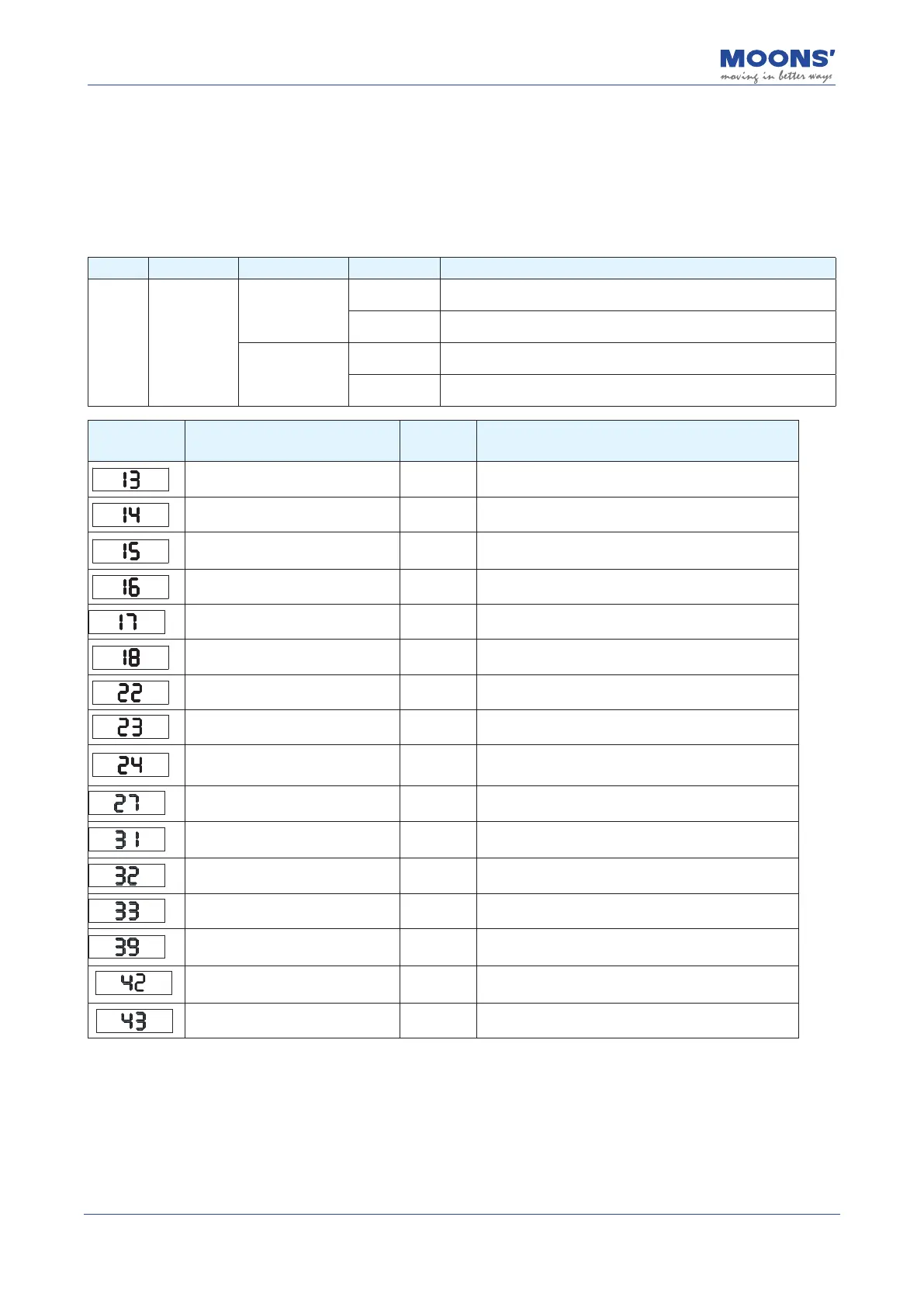
LED Display Description
Alarm
Type
Drive status after the alarm occurs
Limit switch trigger alarm Warning Does not change the current state.
Negative limit alarm Warning
Does not change the current state, the motor
cannot rotate in the negative direction.
Positive limit alarm Warning
Does not change the current state, the motor
cannot rotate in the positive direction.
Current limit Warning Does not change the current state.
Communication Error Warning Does not change the current state.
Parameter save failed Warning Does not change the current state.
Under-voltage warning Warning Does not change the current state.
No Q program warning Warning Does not change the current state.
Motion command received while
motor disabled.
Warning Does not change the current state.
Emergency stopped Warning Motor decelerates to stop.
Absolute encoder battery
undervoltage
Warning Does not change the current state.
Absolute position lost Warning Does not change the current state.
Absolute position overow Warning Does not change the current state.
Homing parameters conguration
error
Warning Does not change the current state.
IO signal used is not general
purpose
Warning Does not change the current state.
Bus watchdog trigger Warning Does not change the current state.