139
Rev. 2.0
07/27/2023
MBDV Hardware Manual
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P2-07 AC Target acceleration (point-to-point) 100 0.167 ~ 5000 rps/s P S T F
Acceleration value in point-to-point command position mode.
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P2-08 DE Target deceleration (point-to-point) 100 0.167 ~ 5000 rps/s P S T F
Deceleration value in point-to-point command position mode.
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P2-09 VC Velocity change (point-to-point) 2 0 ~ 100 rps P S T F
The internal position mode has point-to-point positioning control with variable speed. This parameter is used to set the speed value of
the second stage.
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P2-18 HA1 1st Homing acceleration/deceleration 100 0.167 ~ 5000 rps/s P S T
Sets or requests the acceleration/deceleration rate used in the homing function.
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P2-24 HV1 Homing velocity 1 10 0.0042 ~ 100 rps P S T
Sets the velocity used in the rst state of a homing operation.
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P2-25 HV2 Homing velocity 2 1 0.0042 ~ 100 rps P S T
Sets the velocity used in the second stage of a homing operation.
Parameter Instruction Name Defaults Range Unit
Related
Patterns
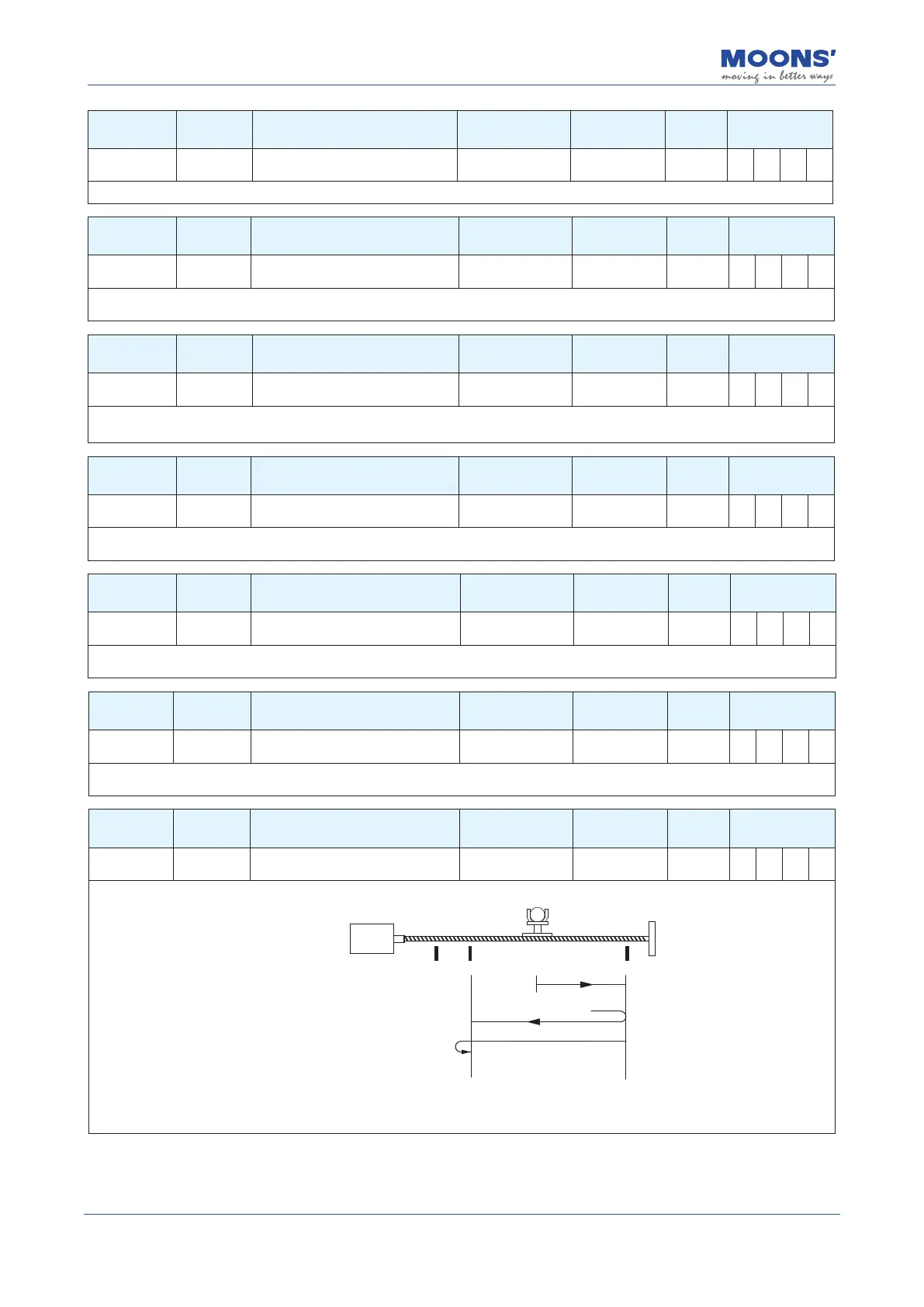
P2-27 HO Homing oset 0
-2147483647 ~
+2147483647
pulses P S T
Sets the oset value during a homing operation. As an example, this value dictates the distance that the motor will back away from a
hard stop during a hard stop home operation.
Left Limit
Origin Right Limit
Find travel switch, parameter
P2-18(HA1),P2-24(HV1)
Find origin switch, parameter
P2-18(HA1),P2-24(HV1)
After passing the origin, return to
the origin switch, parameter
P2-18(HA1),P2-25(HV2)
P2-18, P2-24, P2-25, P2-27 parameters are the conguration parameters of the built-in homing function of the drive. For detailed
functions of homing, please refer to 7.10 _ return to origin can