140
Rev. 2.0
07/27/2023
MBDV Hardware Manual
Parameter Instruction Name Defaults Range Unit
Related
Patterns
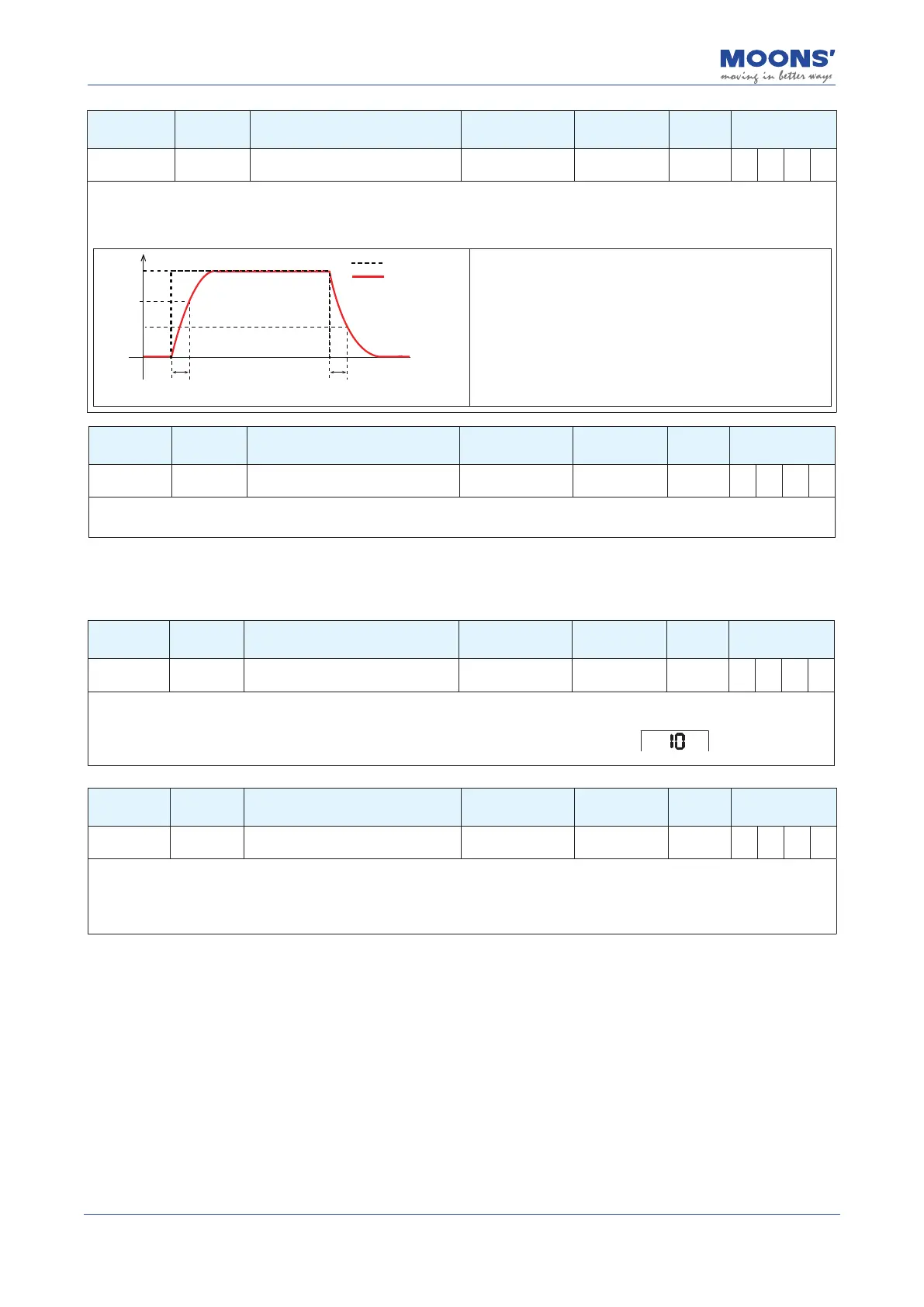
P2-28 KJ Jerk lter 0 0 ~ 1000 ms P S T
Parameter P2-28 low-pass smoothing lter can take eect in the control mode used, such as: internal trajectory mode (position,
speed, torque), analog position, analog speed, analog torque, communication command control, etc.
The smoothing eect of the low-pass lter on the input command is shown in the gure below.
Motor Speed
Target Speed Instruction
Filtered Speed
V
C
V
C
×0.632
V
C
×0.368
P2-28 P2-28 Time
◆
Low-pass smoothing lter will produce a certain delay T for
the instruction, but it will not aect the nal positioning accuracy.
◆
The larger the time constant of P2-28, the more obvious the
smoothing eect, and the longer the instruction response delay.
Therefore, we should set the reasonable lter time constant
according to the practical application.
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P2-30 VT Speed limit in torque mode 80 0 ~ 100 rps P S T
In torque control mode, this parameter can be used as the direct speed limit. No input is required to enable this speed limit. It will be
enabled as soon as torque control mode is enabled at the drive.
8.3.4 P3-XX group: Encoder & Step/Dir--- Encoder and input pulse settings
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P3-04 PF Position error limit 100000 0 ~ 2147483647 pulses P S T
The threshold for position error overrun error.
During the movement, when the deviation between the target position and the actual position fed back by the encoder exceeds the
threshold, an error over-limit error will occur. The drive LED display panel will display an error code
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P3-05 EG Electronic Gearing 10000 200 ~ 131072 pulses/rev P S T
Set the number of pulses per revolution of the motor.
When parameter P3-16 = 1, this parameter setting is invalid and has no eect on the resolution of the motor. The number of pulses
required for each revolution of the motor will be set by the parameter P3-00 electronic gear ratio numerator and P3-01 Motor gear
ratio denominator.