63
Rev. 2.0
07/27/2023
MBDV Hardware Manual
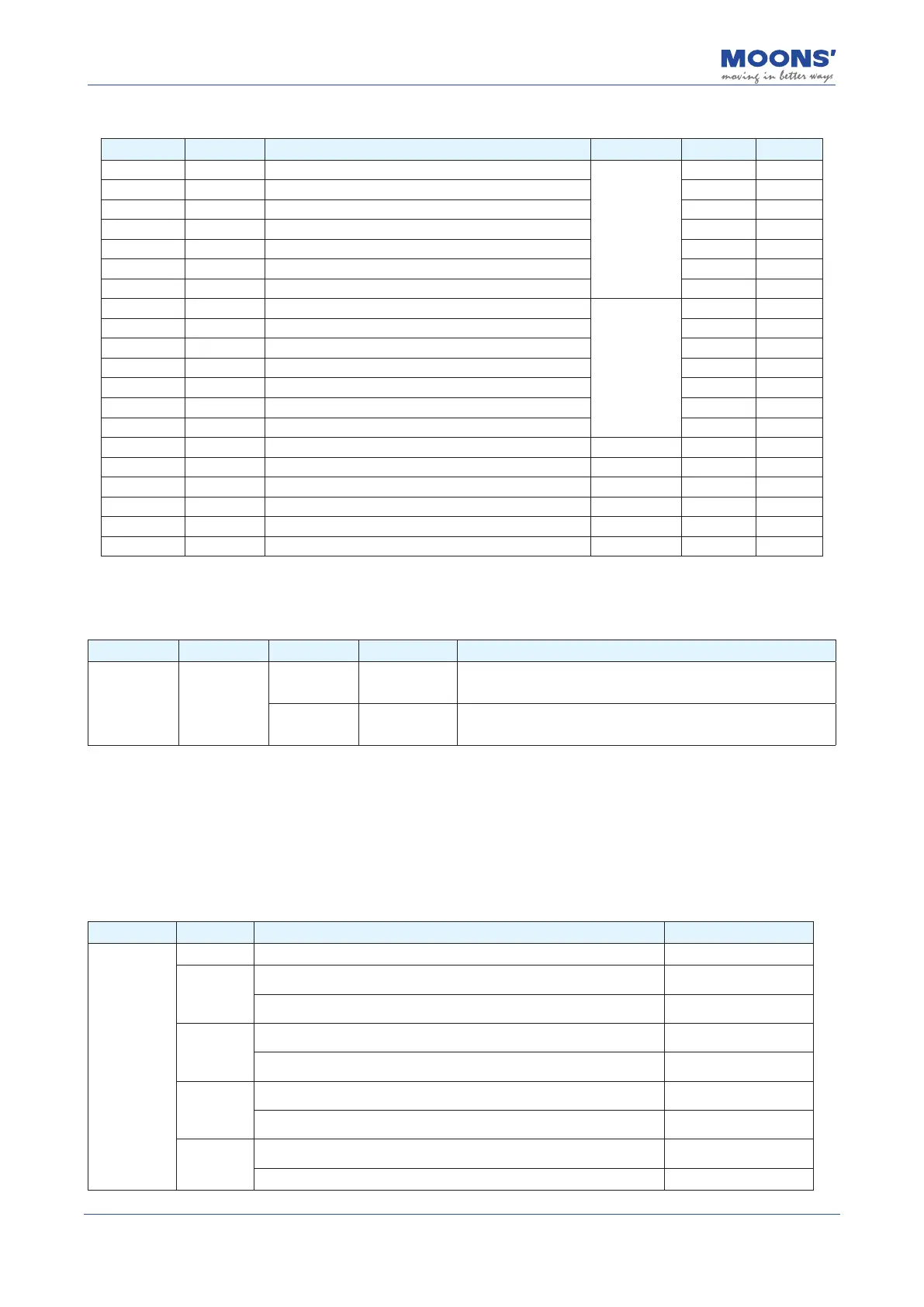
1) Tuning Parameters
Parameter Command Description Class Defaults Unit
P0-05 KP 1st position loop gain
1st Gain Group
52 0.1Hz
P0-07 KD 1st position loop derivative time constant 0 ms
P0-08 KE 1st position loop derivative lter 20000 0.1Hz
P0-11 KF 1st velocity command gain 10000 0.01%
P0-12 VP 1st velocity loop gain 183 0.1Hz
P0-13 VI 1st speed loop integral time constant 189 ms
P0-16 KC 1st command torque lter frequency 1099 0.1Hz
P0-17 UP 2nd position loop gain
2nd Gain
Group
52 0.1Hz
P0-19 UD 2nd position loop derivative time constant 0 ms
P0-20 UE 2nd position loop derivative time constant 20000 0.1Hz
P0-21 UF 2nd velocity command gain 10000 0.01%
P0-22 UV 2nd velocity loop gain 183 0.1Hz
P0-23 UG 2nd velocity loop integral time constant 189 ms
P0-24 UC 2nd command torque lter frequency 1099 0.1Hz
P0-33 SD Automatic gain switching method - 0
P0-34 PN Gain switching condition - position error - 0 counts
P0-35 VN Gain switching condition - actual velocity - 0 0.025rps
P0-36 TN Gain switching condition - actual torque - 10 0.1%
P0-37 SE1 Delay time - 2nd Group Gains to 1st Group Gains - 10 ms
P0-38 SE2 Delay time - 1st Group Gains to 2nd Group Gains - 10 ms
2) Digital Input Signal
Servo drive will switch the rst gain to the second gain, when the the digital input signal GAIN-SEL
input is valid.
Type Signal Symbol Setting Signal logic Description
Input GAIN-SEL
11 Closed
When GAIN-SEL input is CLOSED, 2nd Gain Group takes eect.
When GAIN-SEL input is OPEN, 1nd Gain Group takes eect.
12 Open
When GAIN-SEL input is OPEN, 2nd Gain Group takes eect.
When GAIN-SEL input is CLOSED, 1nd Gain Group takes eect.
Note:
◆
Automatic gain switching is invalid when the gain switching method is set to external input
switching, via the GAIN-SEL signal.
That means no matter how P0-33 is set, the gain switching
determined by the external input signal.
3) Automatic Gain Switch
Parameter P0-33 is used to set the method of automatic gain switching
Parameter Setting Condition Switching Delay Time
P0-33
0 (Default) Fix at 1st Gain Group -
1
Condition for switching to 2nd Gain Group: Absolute Position following
error ≥ P0-34
P0-38
Condition for switching to 1st Gain Group: Absolute Position following
error < P0-34
P0-37
2
Condition for switching to 2nd Gain Group: Absolute value of motor
speed ≥ P0-35
P0-38
Condition for switching to 1st Gain Group: Absolute value of motor speed
< P0-35
P0-37
3
Condition for switching to 2nd Gain Group: Absolute value of motor
torque ≥ P0-36
P0-38
Condition for switching to 1st Gain Group: Absolute value of motor torque
< P0-36
P0-37
4
Condition for switching to 2nd Gain Group: the positioning is not
completed.
P0-38
Return to 1st Gain Group: the positioning is kept in completed. P0-37